| 单位 | : | 成都理工大学地质灾害防治与
地质环境保护国家重点实验室 |
|
| 联系人员 | : | 郭晨 许强 董秀军 巨袁臻 宁浩 | |
| 联系电话 | 18328504132 | ||
成都理工大学地质灾害防治与地质环境保护国家重点实验室
2018年11月18日
无人机在黄土滑坡早期识别与
监测预警中的应用
1、项目背景
我国黄土分布广泛,黄土地区占了我国约 10%的国土面积,滑坡灾害也成为了黄土地区主要地质灾害,严重影响了黄土高原地区的经济发展,自1968年开始提水灌溉后,甘肃省黑方台已发生了100多次滑坡,平均每年3-5次,被国内外称为黄土滑坡的“天然实验室”。滑坡的早期识别以及监测预警一直是世界公认的难题。地面监测手段从传统的人工监测到如今迅猛发展的GPS、自动裂缝计等都具有一定的盲目性,由于监测区域大,无法精确定位监测点,因而撒网式布设监测仪器收效甚微,常常布设的仪器在一夜之间随滑坡滑走,损失较严重。新兴发展的具有大范围监测能力的 InSAR 技术应用于滑坡早期识别和形变监测具有较好的结果,但是由于InSAR 技术的数据处理困难,费用昂贵,设备和使用条件的各种限制,应用并不广泛。无人机摄影测量技术具有成本相对较低、机动性能好、灵活高效、产品精度高等特点,不仅可以进行滑坡的精细化测绘,而且将两期高精度DEM进行差分处理,即可发现正在变形的区域,进而对这些区域布设地面监测仪器进行重点监测,在掌握滑坡成因模式、变形破坏特点以及变形运动规律的基础上,就能实现滑坡灾害的监测预警,保障当地居民的生产生活安全。
2、技术路线
本文基于摄影测量技术,使用飞马F1000无人机对甘肃省黑方台滑坡进行了多期航拍,通过无人机飞行获得测区的点云数据、三维模型数据和正射影像图。使用多期数据处理方法将两期航拍三维网格模型进行处理、配对校准和差分分析。进而通过现场调查和现有地面监测数据对差分模型识别变形的可靠性进行了验证,从而实现了区域的滑坡早期变形识别,进而对识别出的重点变形区域布设裂缝计、GPS等传感器采集滑坡形变信息,并结合多年来对黑方台黄土滑坡调查研究而提出的滑坡预警模型,在2018年5月13日和2018年10月1日成功预警两起黄土滑坡,提前8小时系统自动发布预警信息,及时撤离相关村民,避免了人员伤亡,实现了该区黄土滑坡的监测预警。
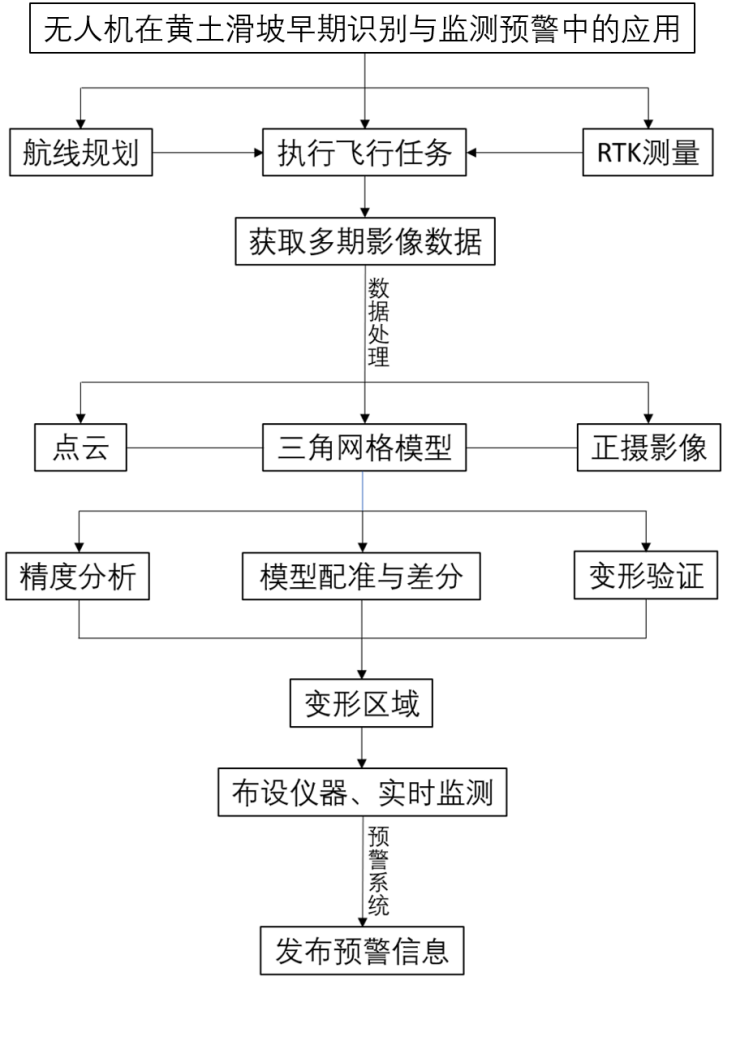
图1 技术路线图
3、作业流程
(1)无人机装备和飞行参数设计
本次航拍采用飞马F1000电动固定翼无人机,其机身采用EPO高强度塑料,飞机连接部位使用炭纤维复合材料,因此其机身重量轻。飞马1000的最大续航时间为1.5h(黑方台实际作业时间约为1h),除开搭载GPS和GLONASS外,还使用了北斗卫星导航系统,因此飞机定位精度更高,该机型使用的相机为Sony ILCE-5100_E20mmF2.8_20.0_6000x4000 (RGB)。该飞机具有良好的续航能力,最大的优点是实现了全程智能飞行,无操控手无遥控器。出于对飞行面积和飞行时间的考虑,并保证较高的地面分辨率,该区域相对飞行高度为200m,航向重叠率为80%,旁向重叠率为60%,平均地面分辨率约为4cm。覆盖整个台塬飞行的面积约为30km2,分7个架次完成,对于三大重点区域采取分段飞行,分段飞行面积均控制在5km2以内。从2016年开始,每年定期对黑方台进行无人机航拍,每年约4-5次,并在灌溉导致的滑坡高发期加大飞行频率。

图2 现场作业照片
![C:\Users\巨袁臻\Documents\Tencent Files\415384857\FileRecv\MobileFile\]{DD`HC$BTQVO}%%A5RNS{K.png](https://cheesi-1251680498.file.myqcloud.com/wp-content/uploads/2019/09/c-users-documents-tencent-files-415384857-fil.jpeg)
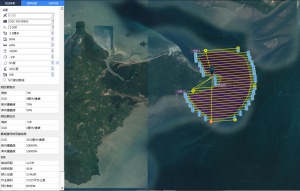
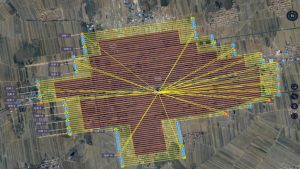
图3飞马无人机管家航线规划
(2)地面控制点布置和测量
为了对测区航拍影像进行矫正、建立控制网并为影像定义坐标系统,在使用无人机进行航拍获取影像数据之前需要对测区布设一定数量的地面控制点。地面控制点需要在航拍照片中清晰可见以便后期数据处理中能够人为识别刺点,其分布需要覆盖测区并在地形和高程变化较大的区域加大布设密度。黑方台地面控制点是专门为航拍所做的人工标识。根据无人机航拍高度和地面分辨率,考虑到作业效率以及长期航拍的目的,黑方台人工地面控制点使用油漆在地面上做直角形状的标识,长款尺寸为1m x 1m,直角两边油漆宽度为40cm,如图4所示的直角油漆标识。由于现场条件所限,这些油漆点一部分分布在现成道路边,一部分分布在人工制成的混凝土板上,混凝土板主要布设在测区台塬边及滑坡堆积体上。黑方台的地面控制点分布如图3-5所示。

图4 地面控制点制作过程
在制作好地面控制点后还需要对地面控制点的坐标进行测量,选取直角标识的内角作为测量点。为提高测量的精度,在黑方台布设一级基准点14个,布设原则是能完全覆盖测量区域并且能反映高程变化。第一步先在台塬稳定区域埋设混凝土钢筋桩;第二步待混凝土强度稳定后,使用RTK对基准点进行静态测量,测量时间为1个小时;第三步对静态数据进行解算,获得测点的坐标位置;第四步在静态坐标基础上,对地面控制点进行动态测量。


图5 RTK静态测量和动态测量
黑方台采用Xian 1980 / 3-degree Gauss-Kruger CM 102E (egm96)坐标系统,所有航拍影像后期解算均使用该坐标系,以确保多期数据在同一坐标系下进行比较。一级测量基准点位置见图6。
图6 黑方台测量基准点和地面控制点位置分布
(3)飞行作业
根据预先的航线规划选择合适的飞行场地进行飞行。要求地势相对平坦,在半径为120m的范围内没有建筑物、大树和电塔等阻挡,保证飞机起降的安全;起飞点位置与作业区域不能太远,以便提高无人机电池利用率。
(4)数据处理
在外业飞行的基础上,选用了Pix4d Mapper软件作为黑方台数据处理软件,通过数据预处理、空中三角测量、影像匹配、影像融合、数字产品生产等步骤,主要获得测区的点云数据(Points Cloud)、三维模型(3D-Model)(图3-9),数字正摄影像图(DOM)等一系列数字产品(图7)。
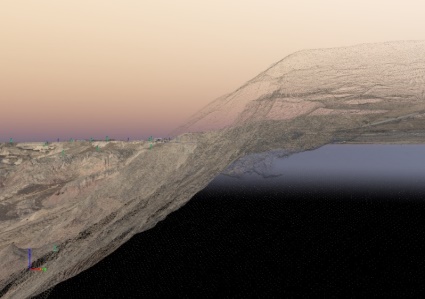

图7 航拍点云、三维模型、正射影像
4、滑坡早期识别与监测预警
在对研究区进行多期无人机航拍的基础上获得了多期黑方台DSM模型,先将两期模型进行定位对齐配准,然后在模型配准的基础上将两期模型高程值相减得到差分模型,以此求得该区域相应时间段内的竖直位移量,对滑坡频发的党川段、焦家段和陈家段进行重点研究,在竖直位移量较大所反映的变形较大部位合理布设裂缝计和GPS等地面监测设备,从而有针对性地加大监测力度,实现滑坡的早期识别和监测预警。
(1)变形验证
使用无人机摄影测量技术获得的变形识别由于受到精度的影响,其识别正确与否还需要现场的监测数据和调查情况进行复核。
a.大变形验证
根据现党川2号滑坡发生于2015年4月29日,根据2015年1月和2016年5月两期模型差分的结果,该滑坡最大滑动深度约34m,最大堆积深度约24m(图9),滑坡体积约为32.4万m3,与实测值较为相符。党川3号滑坡发生于2015年8月3日,滑动体积约为0.6万m3,滑动前后正摄影像见图9,也与实际情况吻合。由此可见,使用无人机摄影测量技术对于已经发生滑坡的滑坡识别是行之有效的,且能通过将相关区域地形数字化,可以得出滑坡的滑动体积。
图8 党川2015/01-2016/05差分模型
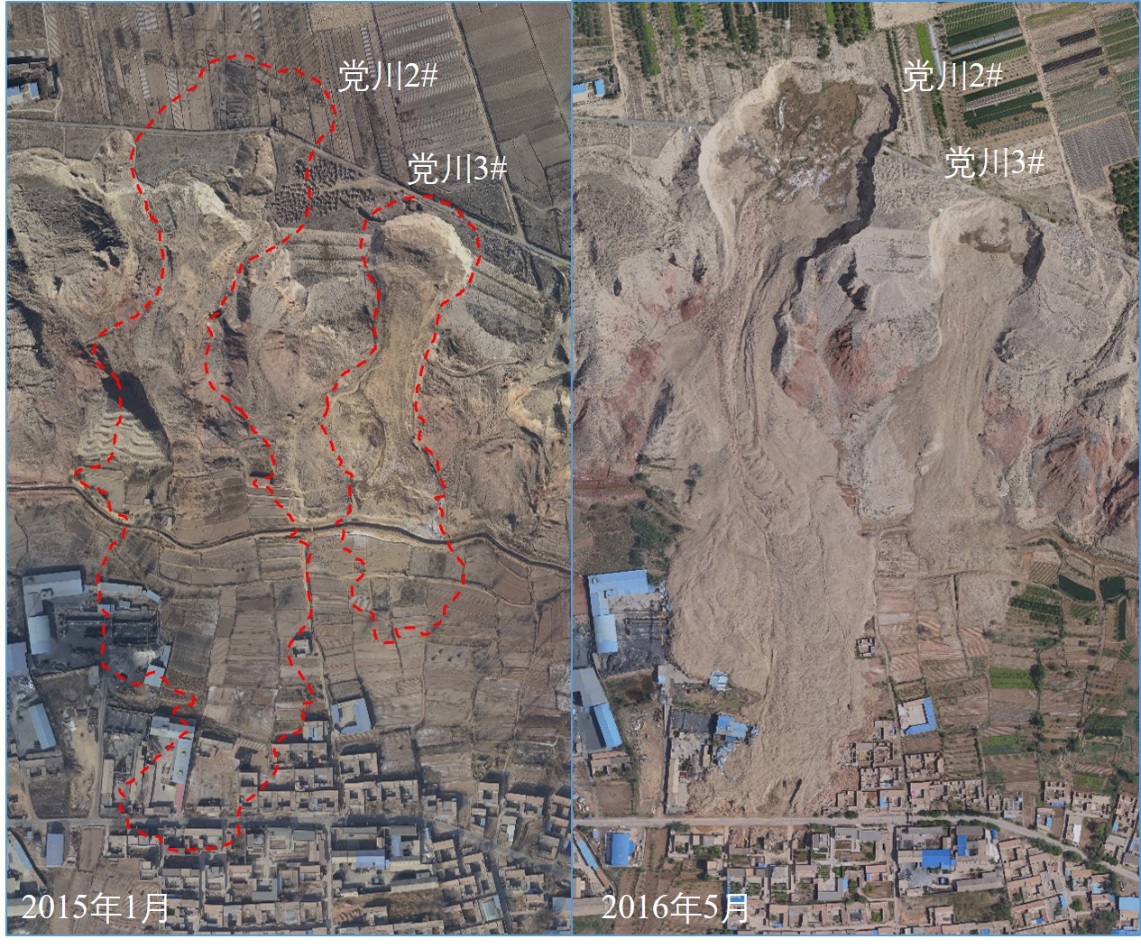
图9 党川2号和党川3号滑动前后正摄影像图
b.小变形验证
党川段2015.01—2016.05的两期差分模型显示,党川3号左侧存在一明显变形(图10),期间变形量约30-40cm,现场布设的裂缝计显示,从2015年10月到2016年5月,1号裂缝计、2号裂缝计和3号裂缝计的累计位移一直持续增长,最大累计位移27cm(图11)。虽然地表裂缝计所监测主要是起点和终点之间的斜距变化情况,但向临空面方向发展的裂缝变形必然伴随着竖直方向的变形。由此可见差分模型的变形较为可靠。
图10 党川2017/01-2017/02差分模型(小变形)
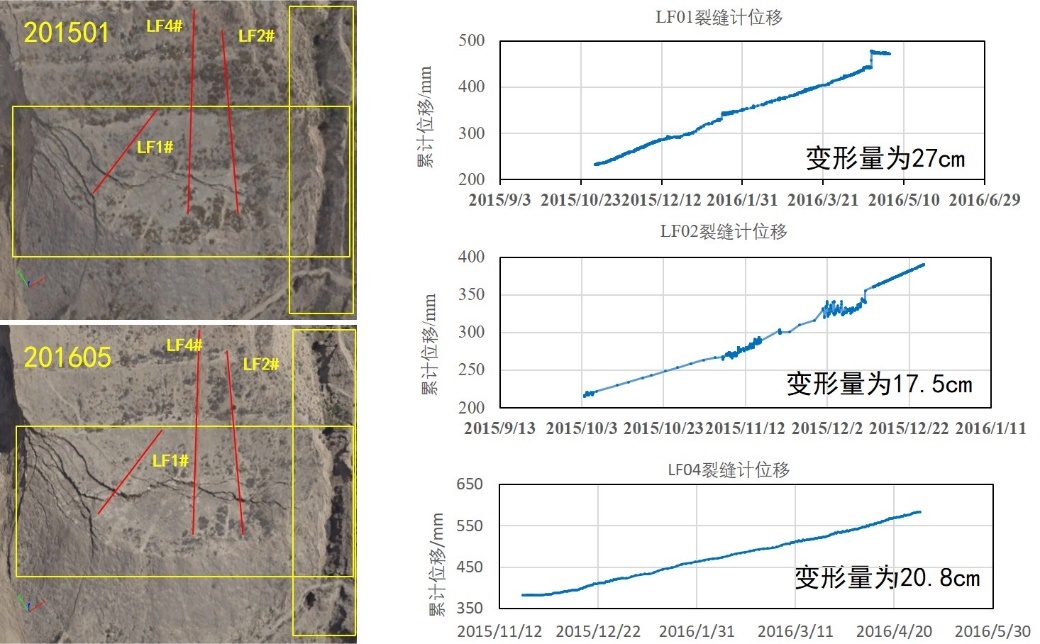
图11 党川3号左侧裂缝影像及裂缝计数据
(2)潜在滑坡早期识别
图12为陈家6#和8#在2016.05—2017.03之间的差分模型,其中从图a和图b中已经分别识别出陈家6#和陈家8#后缘存在明显变形。从现场照片来看,滑坡后缘裂缝有变宽趋势,错台沉降明显增加。图13是党川段2016.05-2015.01的差分模型,从模型中可以识别出6处变形明显的区域,分别是DC#2左右两侧,DC#3左侧、DC#9、DC#4和DC#5。
根据党川段和陈家段滑坡多发区域的的多期差分模型,并结合现场实际变形情况,在台塬边合理位置布设了自动位移计,以期通过自动位移计实时监测滑坡变形情况,对滑坡进行临滑预警。
图12陈家6#和8#差分模型和后缘裂缝和错台对比
图13 党川段差分模型:(a)2016/05-2015/01;(b)2017/01-2016/05.
(3)监测预警成功案例
根据无人机多期差分模型识别出的变形情况,结合现场情况,在变形较明显的台塬边上布设了多台自动位移计进行位移监测,2017 年 5 月 13 日上午 9:52 分,陈家 6#滑坡后壁产生两处小规模滑动,其中右侧的滑动位于自动位移计的监测范围内,滑坡体积约 600m3,自动位移计完整捕捉了此次滑坡的全过程变形曲线并在变形超过红色阈值后 1 分钟内发出了预警信息,当地人员迅速采取了相关防范措施, 未造成人员伤亡和财产损失(图 14)。
图14(a)陈家 6#滑坡自动位移计布设位置;(b)陈家 6#滑坡变形曲线特征;(c)陈家 6#滑坡红色预警短信
党川4#滑坡9月30日变形速率达45.93mm/d。预警系统在9月30日17时50分自动发出红色预警,当晚紧急撤离20余户居民,10月1日凌晨1点至5点先后三次滑坡,总体积约35万m3,未造成任何人员伤亡,成功预警后,许多媒体都进行了相关报道(图15)。
图15党川4#滑坡预警信息及相关报道
5、精度分析
因该区域无人机飞行时间跨度较大,次数较多,但精度基本相同,现选取焦家和陈家段2017年1月飞行时的地面控制点和检查点来进行精度分析,之后的飞行随着控制点的增多,相对精度也在逐渐提高。
焦家和陈家段共使用地面控制点69个,检查点24个,航拍核心区域为图中阴影区域,黄色阴影是陈家段,蓝色阴影是焦家段(图16)。地面控制点和检查点在塬边和滑坡体上均有布设,位置和数量已经能够将目标区域完全覆盖。
图16 2017/01党川段、焦家和陈家段地面控制点和检查点分布图
如表1所示:焦家和陈家段控制点在平面上均方根误差在0.021m内,最大误差为0.059m;高程上均方根误差为0.033cm,最大误差为0.073cm;而检查点在平面上的均方根误差和最大误差分别为0.042m和-0.074m,在高程上均方根误差为0.039m,最大误差为-0.063m。因此2017年1月焦家和陈家段航拍的平面精度为7.4cm,高程精度为7.3cm。后期通过适当增加控制点,将精度提高到了6cm以内。
根据在黑方台布置的监测仪器所反映的斜坡形变数据可知,一般滑坡从初始变形、等速变形到加速变形阶段产生的形变量往往为几十厘米,这个形变量远大于高程上的最大误差,因而证明该方法在黄土滑坡早期识别中能够很好应用。
表1 2017.01焦家和陈家段地面控制点和检查点的误差
6、总结
本项目采用无人机摄影测量的方法,获取研究区多时序无人机影像及三维数字产品,通过RTK测量保证精度减小误差的条件下,利用多期模型差分计算,找到了黑方台黄土台塬边正在变形的区域,解决了滑坡早期识别的难题,从而有针对性地布设裂缝计、GPS等监测仪器,进而利用实地调查结合科学研究开发的预警模型,对滑坡形变数据进行实时自动分析判断,从而实现了该区域滑坡的自动监测预警,并两次成功提前预警滑坡,创新性突破了黄土滑坡预警难题,另外该方法在滑坡等地质灾害变形识别以及体积、面积量测方面具有较高的实用性。
近些年无人机低空摄影测量行业的飞速发展,无人机摄影测量技术受各类因素影响较小,作业灵活、高效,产品精度高等一系列优点,在滑坡早期识别尤其是滑坡精细化测绘方面具有重要的实用价值和科学意义。随着无人机定位精度、拍照精度、续航能力的进一步提升,相信其在地质灾害防治领域将会有更为广阔的前景。