| 黑龙江精臻科技发展有限公司
投稿人:孟祥宇 |
目 录
一、项目概况 3
1、项目背景 3
2、项目需求 3
2.1测区范围 3
2.2项目要求 4
2.3人员及设备 5
二、技术路线 7
三、项目实施 8
1、数据采集 8
1.1测区踏勘 8
1.2航线设计 8
1.3像控点布设 9
1.4航飞情况 10
2、数据预处理 10
2.1差分解算 10
2.2空三加密 11
3、数据生产 12
3.1高精度实景三维模型生产 12
3.2正射影像图制作 13
4、内业测图 13
5、精度检核 14
6、效率对比 15
四、应用案例 15
五、总结 17
一、项目概况
1、项目背景
在农村宅基地和集体建设用地使用权确权登记发证数据成果资料基础上,补充调查农村范围内宅基地和集体建设用地等每一宗土地上的房屋等建筑物、构筑物的基本情况,基本实现宅基地和农房统一调查规范、统一软件平台、统一数据管理、统一作业要求、统一质量标准、统一档案管理的目标,为推进农村宅基地和地上房屋的不动产统一登记发证提供数据支撑。不动产权籍调查(农房补充调查)是开展不动产统一登记工作的重要基础,对于完善不动产调查体系具有重要意义。
传统不动产权籍调查一般采用人工跑点的测量方式,采用全站仪+GPS RTK的技术进行每个农房的调查,其精度较高,但仍有一定的局限性,比如作业效率低、房屋密集不通视、数据成果单一等等。随着无人机倾斜摄影技术的快速发展,利用倾斜影像建立的高精度实景三维模型生产大比例尺线划图已经成为了现实。我公司在积累了相关生产经验的基础上,在宝清县五九七农场农房调查项目支撑下,利用飞马多旋翼平台D200倾斜系统对试点区域进行高分辨率倾斜三维数据的获取与大比例尺测图工作,并检测成果其能否满足不动产权籍调查的高精度项目需求,为后续大面积的权籍调查项目新技术的应用提供参考。
2、项目需求
2.1测区范围
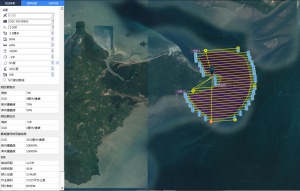
本次试点区域隶属五九七农场,位于宝清县境北部,七星河与挠力河相交的三角地带。测区面积约0.4km2,地势平坦,地面要素主要为居民地与道路等,测区范围如下图所示:

项目范围线
2.2项目要求
1)精度指标
宗地界址点测量主要精度指标
| 类
别 |
界址点相对于邻近图根点
点位中误差 |
界址点间距允许误差、
界址点至邻近地物点关系距离允许误差(cm) |
适用范围 | |
| 中误差(cm) | 允许误差(cm) | |||
| 一 | ±5 | ±10 | ±10 | 街坊外围
界址点及街坊内 明显界址点 |
| 二 | ±7.5 | ±15 | ±15 | 街坊内部
隐蔽界址点 |
| 注:界址点对邻近图根点点位误差系指用解析法勘丈界址点应满足的精度要求;界址点间距允许误差及界址点与邻近地物点关系距离允许误差系指各种方法勘丈界址点应满足的精度要求。 | ||||
2)项目成果
(1)测区实景三维模型一套(数据格式为.osgb);
(2)测区正射影像图一套(数据格式为.tif);
(3)测区大比例尺地形图测图成果一套(数据格式为*.dwg)。
2.3人员及设备
1)人员投入
飞行技术人员与外业测量人员2人,内业编辑人员4人。
2)仪器设备
针对本项目的高精度项目需求,我们采用了飞马D200多旋翼无人机搭载D-OP300倾斜测量模块的方式进行测区倾斜影像数据的获取。飞马D200配备高精度差分GNSS板卡,支持PPK/RTK及其融合作业模式,可大量减少外业控制点或一定条件下完全免像控的1:500航测成图,配合“飞马无人机管家”中精准地形跟随飞行功能,可保证所获取影像分辨率的一致性。

飞马D200飞行平台参数
| 名称 | 参数 |
| 导航卫星 | GPS:L1+L2(20Hz)
BeiDou:B1+B2(20Hz) GLONASS:L1+L2(20Hz) |
| 差分模式 | PPK/RTK及其融合作业模式 |
| 空机重量 | 6.5kg |
| 起飞重量 | 8.5kg |
| 对称电机轴距 | 988mm |
| 外形尺寸(不包括装上螺旋桨叶的尺寸) | 展开 830×732×378mm
折叠 955×362×378mm |
| 续航时间 | 48min(单架次海平面悬停时间) |
| 巡航速度 | 13.5m/s |
| 最大爬升速度 | 10m/s |
| 最大下降速度 | 8m/s |
| 悬停精度RTK | 水平1cm+1ppm;垂直2cm+1ppm |
| 实用升限高度 | 4500m(海拔) |
| 抗风能力 | 5级(正常作业) |
| 任务响应时间 | 展开≤10min,撤收≤15min |
| 测控半径 | 5km |
| 起降方式 | 无遥控器垂直起降 |
| 工作温度 | -20~50℃ |

D-OP300倾斜模块参数
| 名称 | 参数 |
| 镜头数量 | 5 |
| 传感器尺寸 | APS-C(23.5×15.6mm) |
| 有效像素 | 1.2亿(2400万)×5 |
| 镜头焦距 | 下视25mm,斜视35mm |
| 倾斜角度 | 45° |
| 相机重量 | 1.5kg |
3)数据处理软件
数据后处理采用飞马无人机管家、ContextCapture、DP-Modeler三款软件,对倾斜影像进行差分解算、空三计算、实景三维模型生产及大比例尺测图。以下为工作站硬件配置表:
| 计算机 | 系统 | CPU | 显卡 |
| 工作站 | Windows7 | i7-6900k 128G RAM | GeoFroce GTX 1080 |
二、技术路线
不同于常规1:500航测成图精度(一般平面,高程精度13cm以内),权籍精度更高,其平面中误差要求为5cm,因此意味着其不管是影像分辨率、控制点布设、数据处理等都有着极为严格的要求,本次项目详细的技术路线如下图,本文主要讲述项目实施的数据采集、数据预处理、数据生产等几个阶段,并对成果进行精度检核,最后通过投入的人力与生产周期对整个项目进行效率分析。
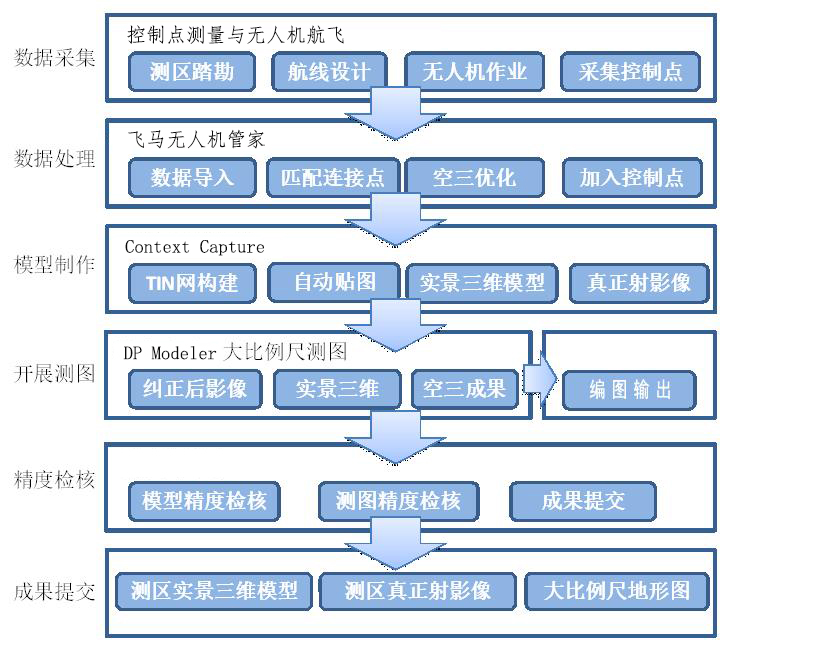
项目技术路线图
三、项目实施
1、数据采集
1.1测区踏勘
踏勘的目的是了解测区的交通情况、行政区划、控制点分布、地形地貌等情况。通过对测区的踏勘,了解测区内建筑物最大高度,以便我们规划航线,制定飞行方案,保证飞行作业的安全。
1.2航线设计
据倾斜的数据处理经验来看,基于控制点约束,倾斜摄影的模型精度一般是地面分辨率的2~3倍,因此为了满足权籍平面5cm精度需求,倾斜影像应获取地面分辨率优于2cm的影像数据,且为保障三维模型的生成效果,其航向,旁向重叠度一般建议优于60%,而当测区存在高楼时,则应加大重叠度,保证楼顶的重叠度。对于地形起伏较大的区域,则应根据地形变高飞行,保证测区内大部分地物的分辨率都优于2cm,以此来保证三维模型的效果及精度。
结合测区踏勘的情况,设计地面分辨率为1.7cm,航高为108m,航向重叠度为75%,旁向重叠度为70%,预计飞行时间为60分钟。将测区kml范围线导入飞马无人机管家“智航线”模块,根据测区的地形起伏和影像要求,软件自动生成最佳航线。

航线设计
1.3像控点布设
为满足平面中误差5cm的精度需求,通常情况下建议1km²布设25-35个控制点,同时布设部分检查点,如若太密既浪费人力,物力,也影响后期处理速度,而疏于这个密度的话则可能损失精度。因控制点要应用于后期数据处理,其测量精度须优于2cm,一般需要多次测量取均值,控制点位置一般应选择在地面起伏不大的地面,尽力避免选择房角点或带有高程起伏的角点,以免造成内业人员在刺点时因判断失误刺偏导致数据不满足精度要求。对于飞马D200-OP300平台来说,其具备的五相机独立打标能力及RTK/PPK的融合作业模式,可实现免像控的1:500航测成图,虽不能满足5cm精度需求,但可极大减少控制点的布设,软件通过少量控制点和高精度POS的联合平差,实现项目高精度数据的获取需求。
本项目测区为五九七农场居民区,多为水泥路面,没有明显地面目标和标志物,故采用布设事前像控的方式。结合高精度差分优势,仅需在测区拐点处布设少量地面控制点即可,一般300m左右布设一个点即可。地面标志使用白色油漆喷涂L形标志,要求拐角清晰可见,与地面有明显色差,易于内业人员判刺。
使用RTK连接黑龙江省网CORS,并采用平滑采点功能测量像控点点位坐标值,为保证精度控制在2cm以内,每组像控点采集3个测回,每个测回采集10个点,最后计算平均值,每测回完成后应重启接收机。每组像控点进行拍照记录,要求照片能够反映像控点的地形特征,并做好点之记整理工作。

地面像控点
1.4航飞情况
现场航摄作业时,飞机组装完成后,要根据飞马无人机管家的提示进行一系列严格的检查,在确保安全的情况下才能升空作业。飞机升空作业后,飞手应在地面站对飞机工作状态进行实时监控,时刻关注电池电量、飞机的飞行姿态、航高及速度等指标。航摄完成后应在现场下载POS数据并对航摄影像进行检查和整理,确保POS信息无遗漏,影像清晰。

飞马D200作业现场图
2、数据预处理
2.1差分解算
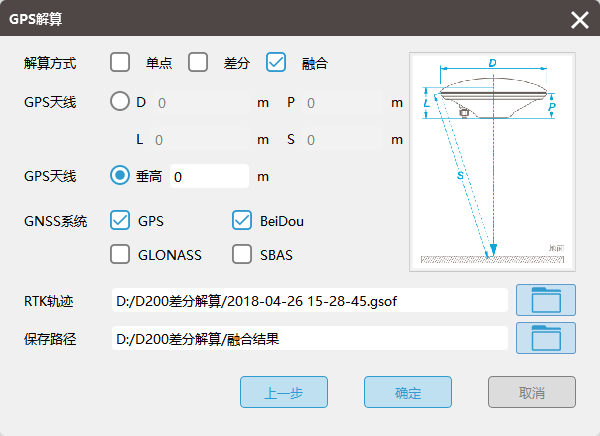
利用飞马无人机管家“智理图”模块,对飞马D200获取的差分POS观测数据进行融合差分GPS解算,得到五组相机的精确POS,再通过七参数将WGS84坐标转换为控制点所在的坐标系,保证坐标系的统一,才能发挥高精度POS的作用。
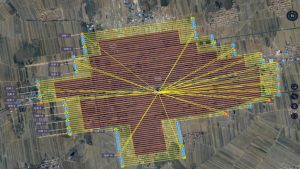
2.2空三加密
利用飞马无人机管家“智拼图”模块,对倾斜数据进行基于高精度POS 的空三加密。设置好倾斜影像与POS数据的对应关系后,对每张影像进行特征点检测和匹配。之后导出xml格式的空三文件,导入ContextCapture软件中,加入控制点,手动调整控制点位置,将控制点与空三网联合平差,优化至合格数值。空三完成后, ContextCapture软件进行自动化建模作业。
空三加密
空三点云成果
3、数据生产
3.1高精度实景三维模型生产
ContextCapture软件经过格网切块、构建TIN网白模、自动纹理映射等流程,生产出测区的高精度实景三维模型成果。常规的三维测图方式,是基于实景三维模型进行的地物采集,若房屋模型结构不完整,几何精度有问题,则后续测图成果很难满足权籍精度要求,因此三维成果的效果及精度检查至关重要。三维模型成果要求纹理清晰,房屋结构尤其是墙体完整,且墙面应尽可能平整,才能保证后期进入测图软件采集的房屋边线及房屋角点准确,而对于房檐下未拍摄到的结构(如阳台里面的构造),则可不关注,因其不影响墙体的采集。然后采用布设的检查点进行三维模型的精度检查,精度合格则进行下一步作业。
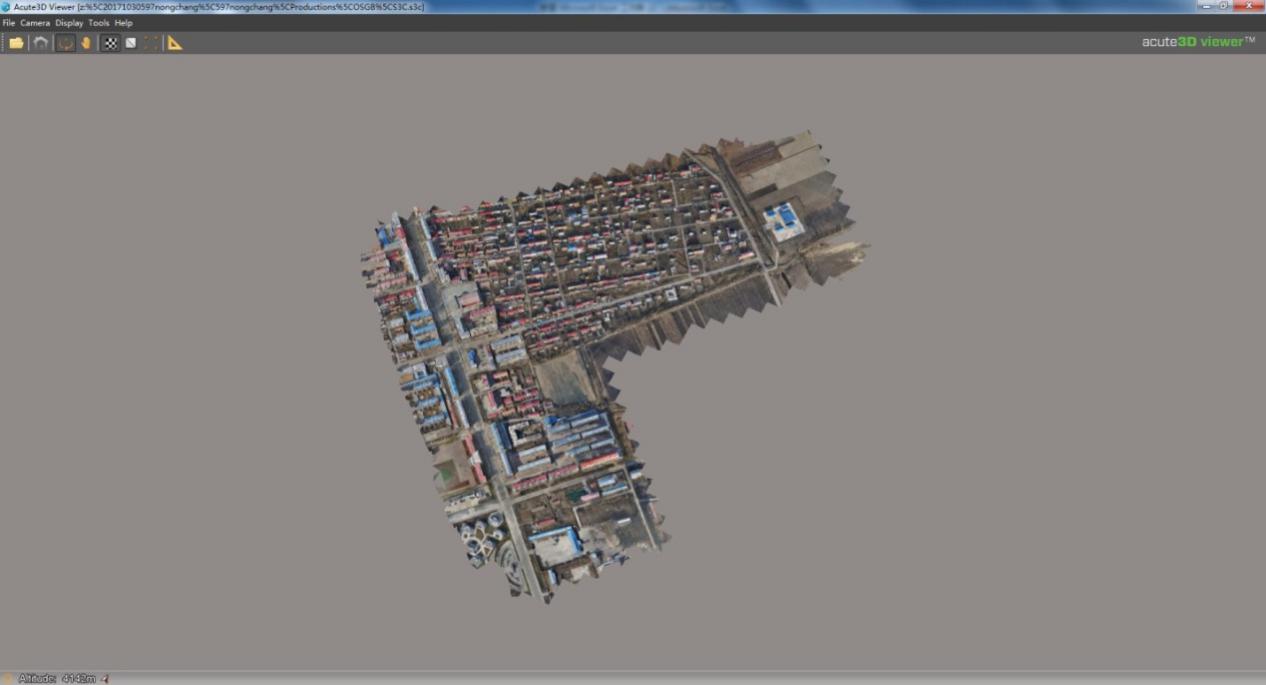
测区实景三维模型成果


模型细节图
3.2正射影像图制作
根据实景三维模型与空三成果文件,以Tile为单位进行格网正射与贴图匹配处理,制作测区正射影像图(DOM),也可用于后期测图参考。

测区正射影像图
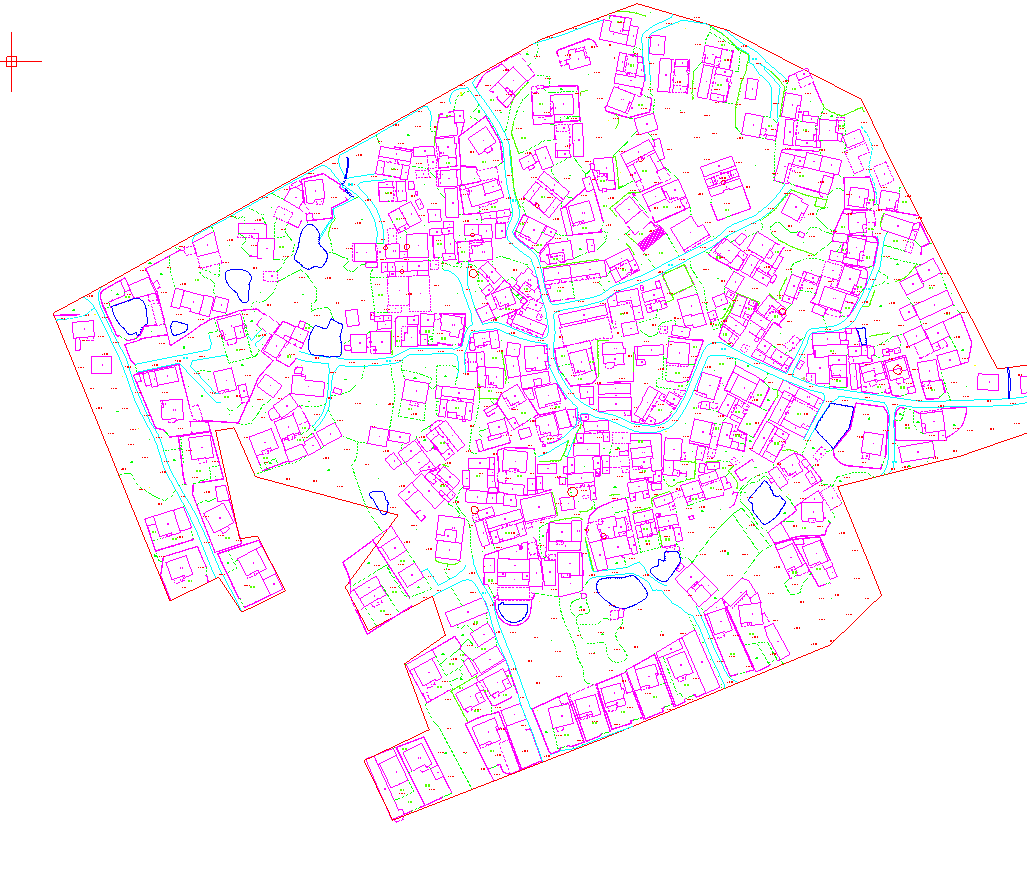
3.3 内业测图
采用DP-Modeler软件进行测图作业,将测区高精度实景三维模型、空三成果、纠正畸变差影像导入软件,制作工程文件,由作业员通过三维模型及多视角倾斜影像进行点、线、面等矢量信息绘制,并按照国标要求赋予要素属性信息,采集房屋时可完成房檐改正、房屋层数等属性录入。
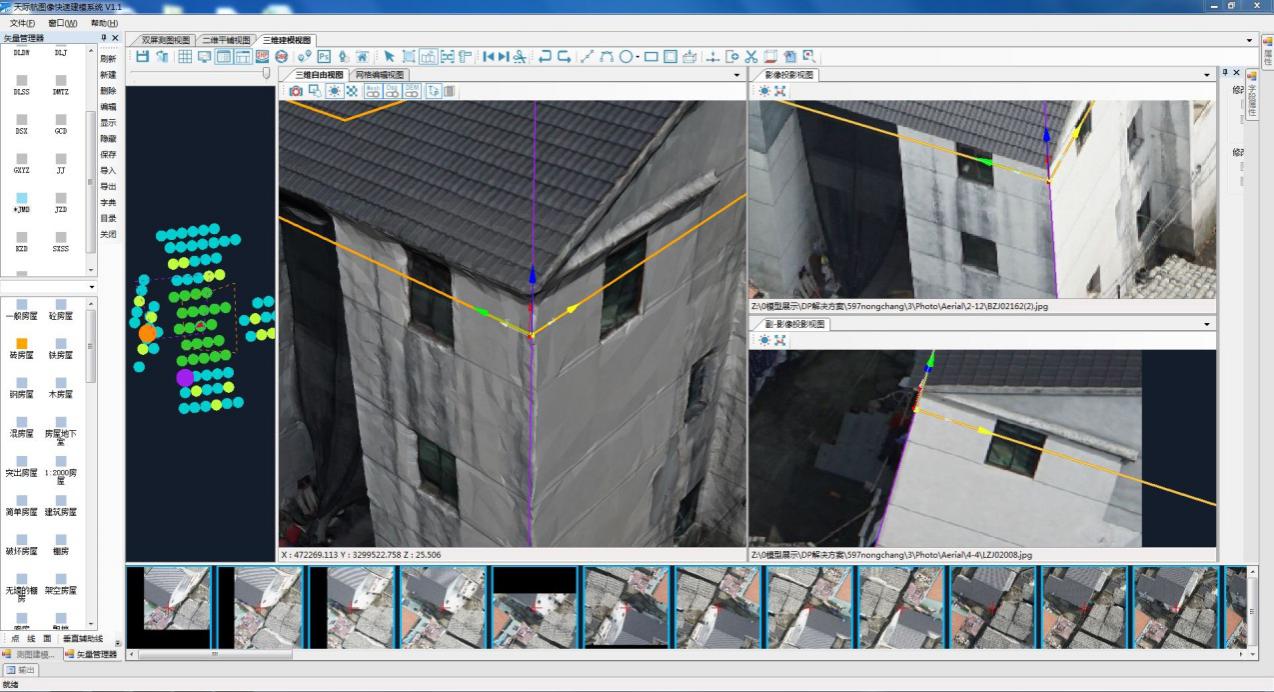
DP-Modeler测图软件
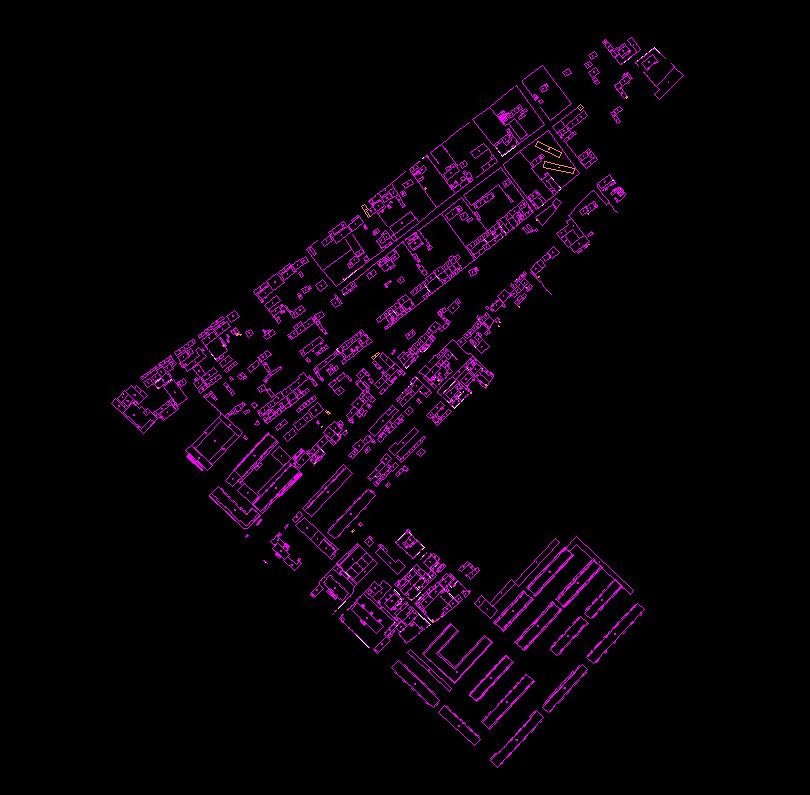
测区测图成果
4、精度检核
测图工作完成后,需对数字线划图的要素精度进行检验,检查采取人工实测的方式对比精度。经检验,平面中误差为0.034m,高程中误差为0.037m,满足不动产权籍调查测量5cm精度要求。
| 误差统计表 | ||||
| 序号 | X残差(m) | Y残差(m) | XY残差(m) | Z残差(m) |
| 1 | 0.024 | 0.031 | 0.04 | 0.01 |
| 2 | -0.015 | 0.018 | 0.02 | 0.04 |
| 3 | -0.027 | -0.012 | 0.03 | 0.06 |
| 4 | -0.009 | -0.002 | 0.01 | 0.03 |
| 5 | 0.05 | -0.04 | 0.06 | 0.02 |
| 6 | -0.03 | 0.016 | 0.03 | 0.04 |
| 7 | 0.02 | -0.009 | 0.02 | 0.01 |
| 8 | 0.037 | -0.017 | 0.04 | 0.08 |
| 9 | -0.02 | -0.029 | 0.04 | 0.04 |
| 10 | -0.03 | 0.002 | 0.03 | 0.03 |
| 11 | 0.01 | 0.03 | 0.03 | 0.06 |
| 12 | -0.04 | 0.032 | 0.05 | 0.05 |
| 13 | -0.041 | -0.002 | 0.04 | 0.06 |
| 14 | -0.006 | 0.032 | 0.03 | 0.02 |
| 15 | -0.003 | 0.04 | 0.04 | 0.02 |
| 16 | -0.016 | -0.02 | 0.03 | 0.04 |
| 17 | -0.02 | 0.026 | 0.03 | 0.03 |
| 18 | 0.04 | -0.015 | 0.04 | 0.03 |
| 19 | 0 | -0.02 | 0.02 | 0.02 |
| 20 | 0.009 | -0.024 | 0.03 | 0.04 |
| 中误差:平面0.034m 高程0.037m | ||||
5、效率对比
为了能准确的计算出项目成本,我们从人员投入、外业作业时间及内业测图时间三个方面,对两种不同技术手段的作业效率进行了对比统计(如下图),由此图可看出本项目采用的基于倾斜的三维测图技术较传统人工测图来说有很大的优势,可极大降低人力投入,提高作业效率。
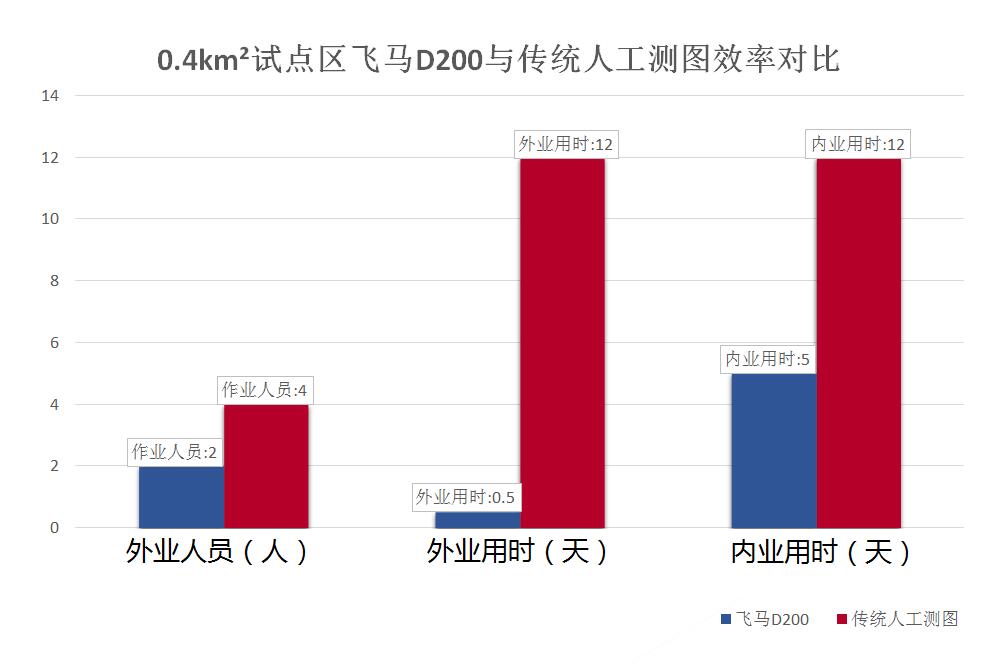
效率统计
四、应用案例
在验证基于倾斜的三维测图技术可满足权籍调查精度要求后,我公司即将该技术应用在实际的工程项目中。2018年7月,我公司接到福建省地籍项目需求,由于该测区地形复杂,房屋密集,通视情况差,无法使用全站仪或RTK进行外业数据采集,传统地籍测量方法不能按时提交成果,因此我公司采用飞马智能航测系统D200搭载D-OP300倾斜模块进行倾斜影像数据获取。到目前为止,已经完成有效测图面积约为24.5km²的数据采集及生产,均满足地籍精度要求。
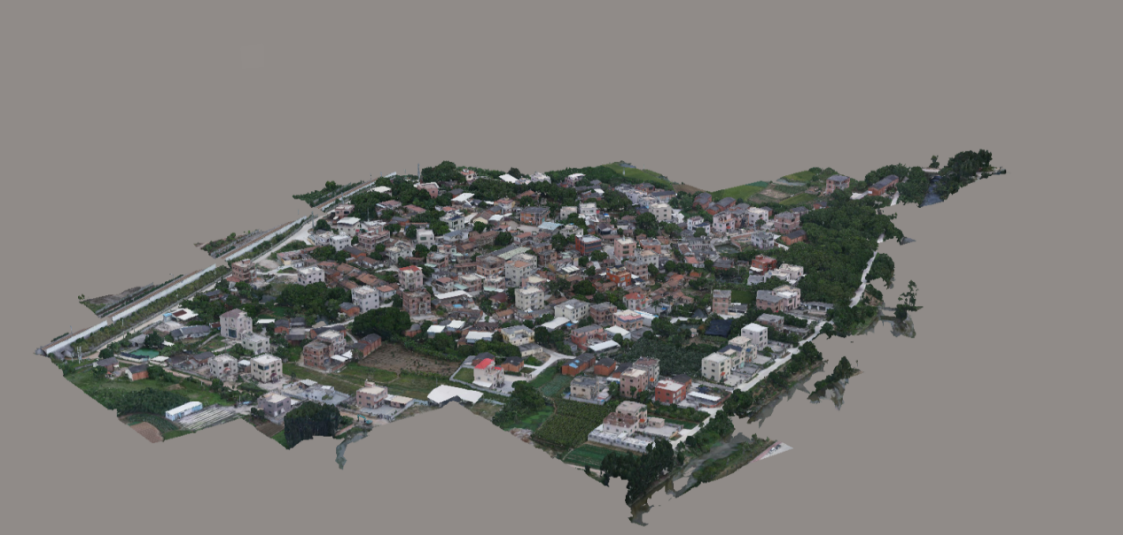
测区成果图展示
五、总结
本项目采用飞马D200多旋翼无人机搭载D-OP300倾斜测量模块的方式进行测区倾斜影像数据获取,能够在较短的时间生产高质量、高精度的模型成果,并在此基础上进行大比例尺测图工作。此方式可减少大量外业控制点,将以往需要全野外测绘的测图工作转变为内业加部分外业调绘,大大减轻外业人员劳动强度,提升作业效率,外业采集更自主、更高效,可为不动产权籍调查、数据库建设等工作提供更加丰富、真实、时效性强的基础地理信息数据,整体效果远优于传统测绘方式。