2018年11月18日
目录
1. 项目背景
1.1项目介绍
内蒙古自治区风能资源丰富,其作为邻近华北、东北和西北电网的负荷中心,不单是国家落实可再生能源发展规划的目标地区,而且是开发建设百万及千万千瓦级风电基地的重要地区,被国家确定为“风电三峡”基地。
为了保障风电建设项目的顺利实施,我公司受甲方委托,协助甲方在20天内完成了内蒙古自治区某地1619平方公里的1:1000数字正射影像、1:1000数字高程模型、1:2000数字线划图的制作任务。该项目要求时效性强,因此所有成果为全新数据采集,非修补测。

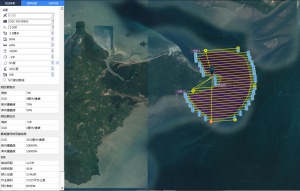
图1.1 一测区范围 图1.2 二测区范围
1.2项目特点
(1)有人机因航高问题短时间内无法审批,因此无法采用有人机作业。
(2)该地区常年风力较大,且项目实施月份大风、降雨等恶劣天气较多,因此需要选择抗风性能好、效率高的无人机进行作业。
(3)该测区以草原地貌为主,无法选到合适的特征点作为像片控制点。
(4)在空三过程中,如果通过传统刺像控点的方式进行空三处理,需要耗费大量的选片刺点时间,增加了空三作业时间。
(5)该项目要求总工期为20天,包含前期的控制作业,且最终成果几乎涵盖了全部的4D产品,并要求统一时间提交。若采用传统手段,仅完成DLG线划图一项就需要组织不少于80~100人的专业测图队伍,但实际投入人员仅有25人。
2. 技术路线
前期准备:资料收集与整理
检查点布设与测量
建立D级GPS控制网
外业航线布设方案制定与分配
无人机外业影像采集
内业空三加密处理
DSM成果
调绘成果
DOM成果
点云成果
DEM成果
DLG成果
内业测图与编辑
等高线
3. 作业流程
3.1 控制测量
根据甲方需求,在测区范围内建立了一套D级GPS平面控制网,并提供国家西安80和国家CGCS2000两套坐标系统的控制成果。
控制点埋石按照技术要求规格制作,预制桩中心埋设7cm带测量标志的不锈钢构件。


图3.1 控制点埋石
该项目外业静态数据观测共投入作业人员十二人,GPS接收机十二台,共观测了四十二个GPS点位,每天观测三个时段,历时三天完成了整个区域的静态数据观测和解算。
3.2 无人机外业采集
3.2.1 无人机选型
根据测区的实际情况,该项目最终选用了飞马F300电动无人机作为飞行平台。首先,该款无人机最大起飞重量小于7公斤,属于轻型无人机,且具备第三方责任险,符合国家相关规定。其次,该款无人机支持RTK\PPK融合技术,可以实现免像控作业,从而解决了内蒙地区难以布设像控的困难。同时,该无人机在5级风力情况下可以安全稳定的飞行,适宜在该测区应用。飞马F300电动无人机搭载了SONY DSC-RX1RM II相机,像片分辨率为4200万像素,可以满足传统立体测图的需要。


图3.2 F300电动无人机 图3.3无人机载荷
表3.1 飞马无人机技术参数表
3.2.2 外业检查点布设及采集
该项目选用的无人机机型,支持免像控功能,原则上不需要布设像控点。但是为了后期检查成果精度,本次在测区范围内布设了适当的检查点。为了提高作业效率,检查点的布设与区域控制点的布设重叠,在控制测量观测的同时,采集外业检查点成果。


图3.4 控制点和航测检查点观测
3.2.3 多机协同的影像数据采集
(1)飞控软件(地面站)设置
①测区内统一规划飞行计划
使用无人机管家专业版中的智航线的航线规划功能,将测区整体范围导入 
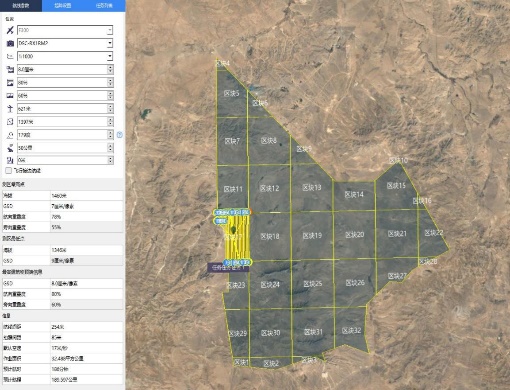 航线设计软件中,根据项目需求以及当地风力风向情况对各个架次进行统一规划。同时将规划的航线计划通过软件的分享功能,分享给其他各组外业飞手。
航线设计软件中,根据项目需求以及当地风力风向情况对各个架次进行统一规划。同时将规划的航线计划通过软件的分享功能,分享给其他各组外业飞手。
图3.5 飞行参数设置
 ② 航线设置
② 航线设置
图3.6航线规划设置
(2)架次划分
1测区F300无人机共计飞行45架次,合计飞行401平方公里。
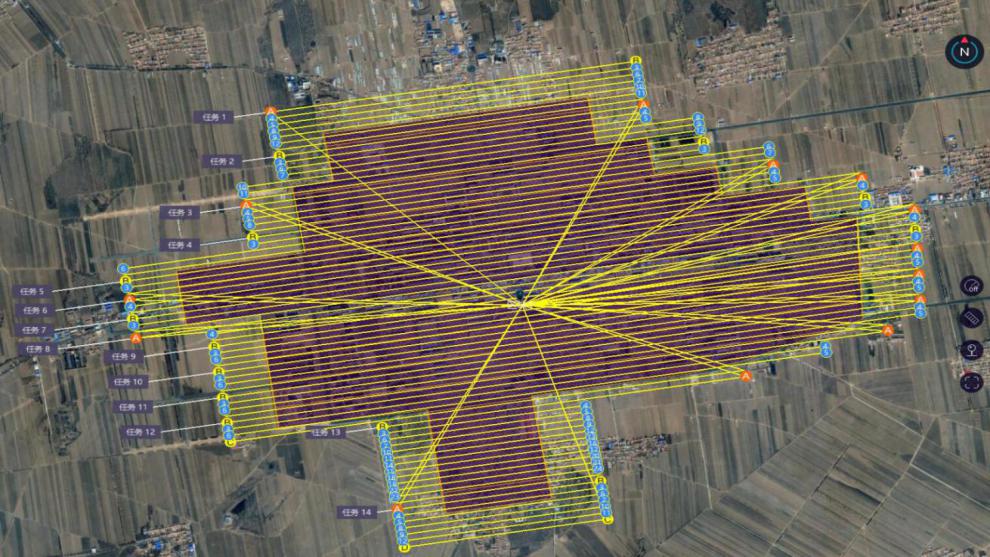
 2测区F300无人机共计飞行132架次,合计飞行约1225平方公里。
2测区F300无人机共计飞行132架次,合计飞行约1225平方公里。
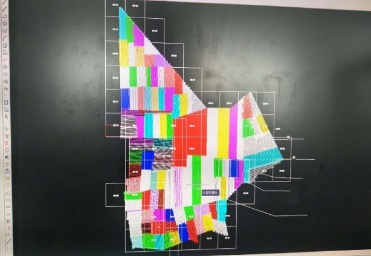
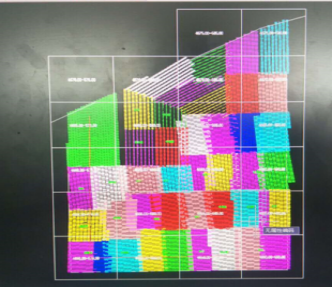
图3.7 一测区各架次分布状况 图3.8 二测区各架次分布状况
(3)无人机手抛起飞
外业各组飞手拿到分享的飞行计划后,检查参数设置是否与当地情况一致。如当地高差较大或其他原因,飞手会对飞行计划进行及时调整。确认各项参数设置无误后,按照工作计划进行外业飞行。

图3.9 无人机手抛起飞
(4)飞行过程实时监控
在外业飞行过程中,无人机飞手可以在本地地面站中实时监测本地无人机的飞行状态,如航速、电量等信息。同时由于多机协同作业,为了飞行安全,除了飞手间直接电话联系外,本次还利用无人机管家专业版的智监控功能,实时查看各组飞机的实际飞行情况。以便根据实际完成情况调整外业飞行方案。
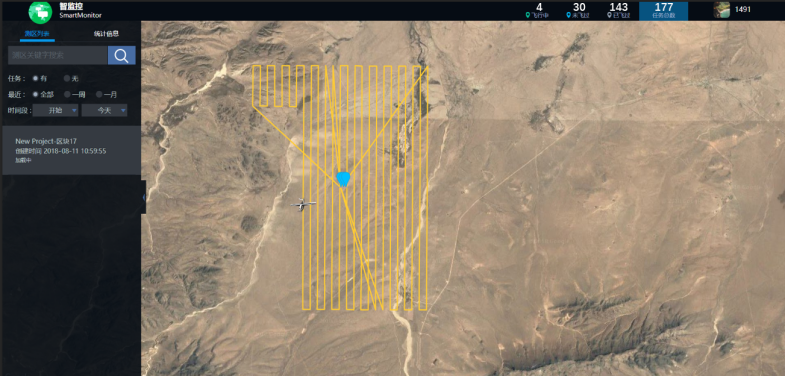
图3.10 智监控实时显示周围飞行状况
(5)飞行质量检查
通过无人机管家质检图功能对本次采集的外业影像进行了质量检查。像片有效范围覆盖了技术设计要求的全部摄区。在航向上超出成图范围的基线均在一条以上,旁向上超出成图范围均为像幅的30%以上,全区无摄影绝对漏洞。航向重叠:一般在75%左右,最小为70%,最大达80%,满足成图要求。旁向重叠:一般在60%左右,最小为 55%,最大达65%,满足成图要求。像对中像片旋偏角:一般小于 4°,有少数像对在5°~7°之间。航线弯曲度:所有的弯曲度均小于2%,符合设计要求。
3.3 内业数据处理
3.3.1 内业处理流程

3.3.2 数据预处理
数据处理系统采用无人机管家专业版软件,该系统空三像点精度优于 2/3 个像素,正射影像精度不大于3个像素,成图精度满足1:1000 DOM、1:1000DEM 和 1:2000DLG精度。
3.3.3 空三加密
 采用无人机管家专业版软件进行空三加密,加密点误差不大于3个像素。空三加密成果满足 1:2000 比例尺成图要求:地物点位中误差小于0.3m,高程中误差小于0.5m。
采用无人机管家专业版软件进行空三加密,加密点误差不大于3个像素。空三加密成果满足 1:2000 比例尺成图要求:地物点位中误差小于0.3m,高程中误差小于0.5m。
图3.12 检查点预测 图3.13 检查点精度报告
3.3.4 DOM与DEM生产
采用无人机管家专业版软件进行DOM\DEM的数据生产。通过生成密集点云得到正射影像成果,对落在建筑、大型植被等处的点云进行分类。利用飞马智激光模块过滤点云,输出DEM。
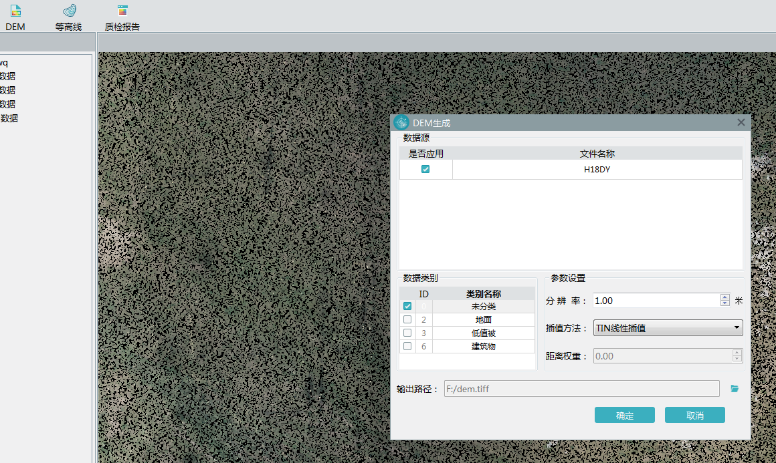
图3.14点云过滤后生成DEM
3.3.5 DLG生产
将DOM及DEM导入测图软件,手动采集地物地貌;采用智激光软件将点云进行分类,并生成等高线。生成的等高线可以在地形图编辑时作为参照依据,对DLG成果进行辅助检查。
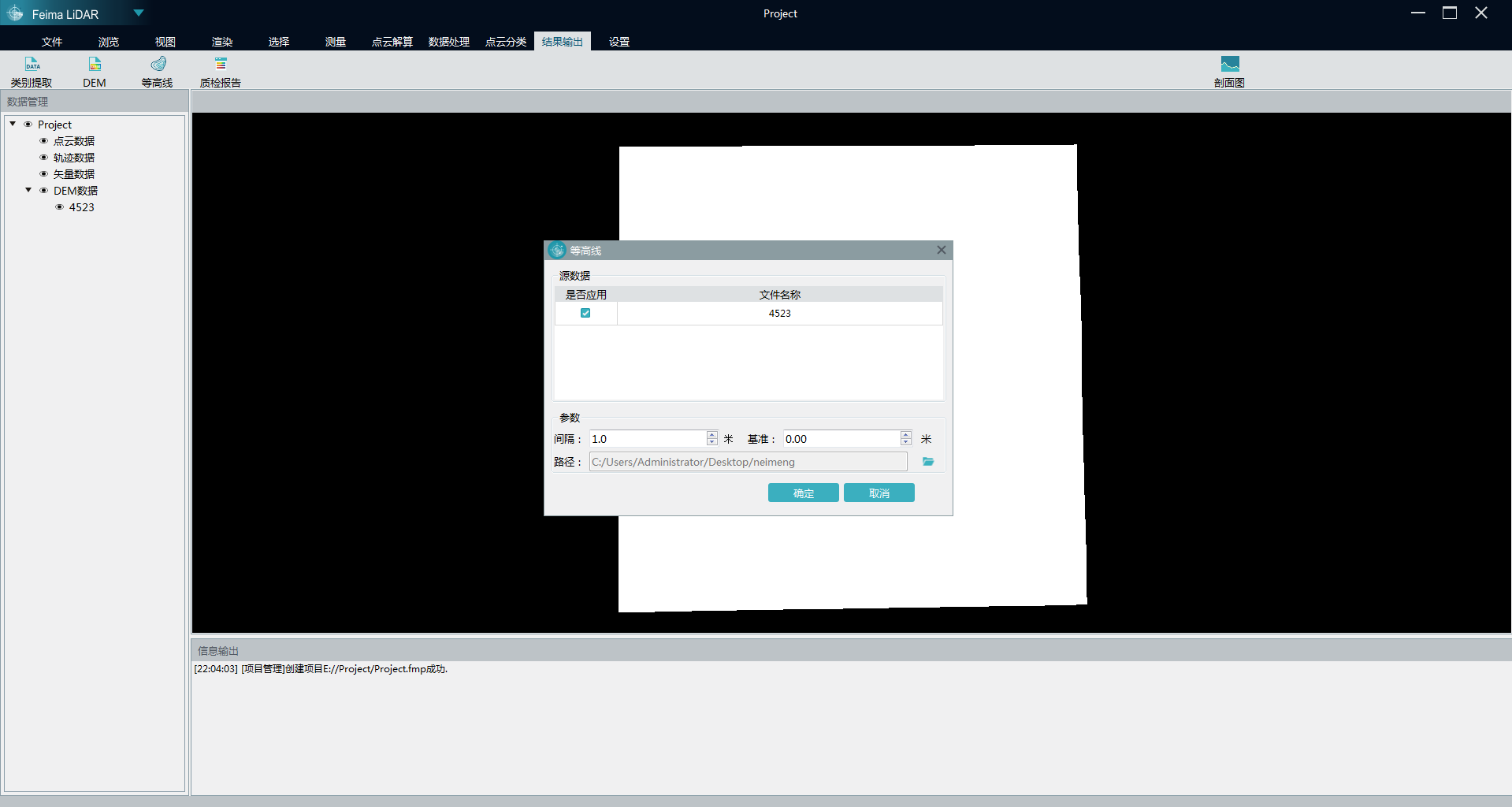
图3.15生成等高线
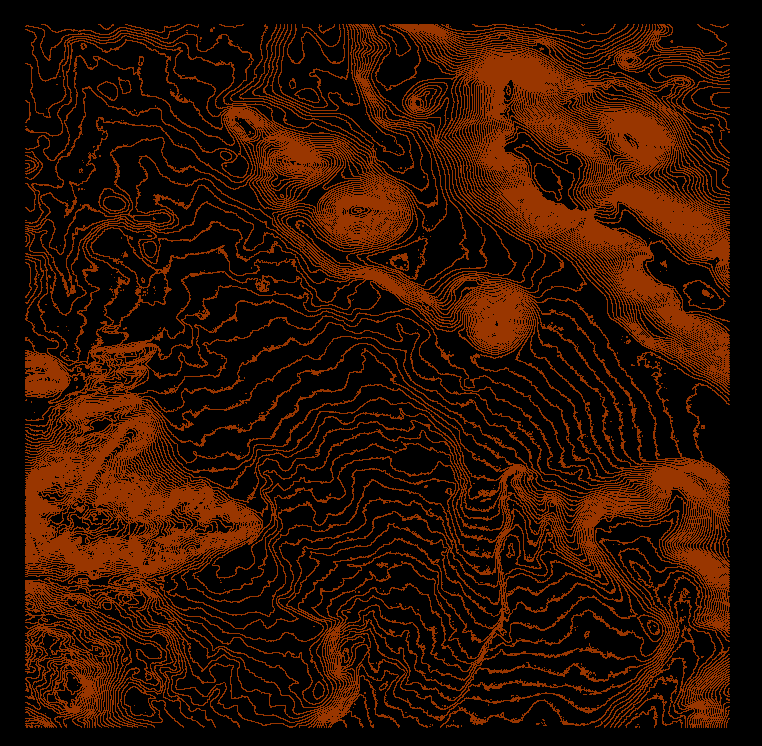
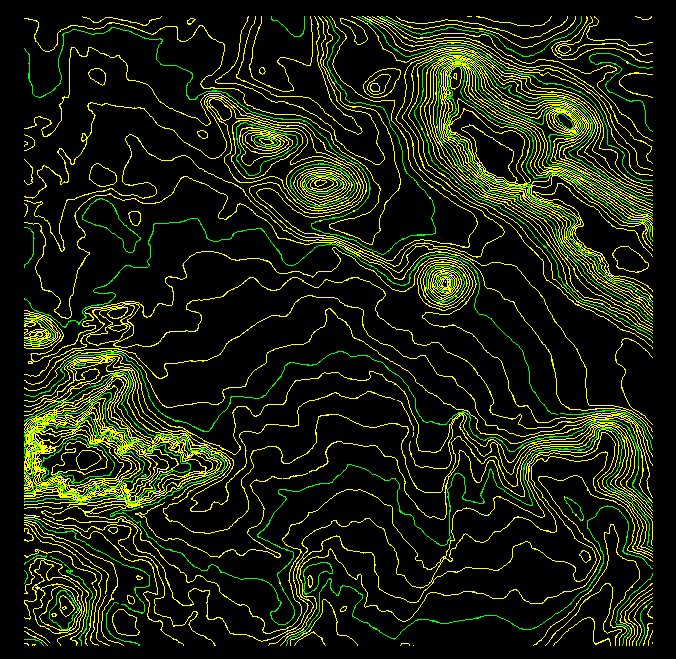 图3.16 生成等高线与编辑后等高线对比
图3.16 生成等高线与编辑后等高线对比4. 航测精度情况
4.1 空三精度情况
表4.1部分检查点精度检查表
| 点编号 | 类型 | X方向 | Y方向 | Z方向 |
| JCD12 | 检查点 | -0.013 | 0.014 | -0.014 |
| JCD13 | 检查点 | -0.079 | 0.028 | 0.013 |
| JCD14 | 检查点 | 0.018 | 0.091 | -0.077 |
| JCD15 | 检查点 | -0.013 | 0.044 | 0.068 |
| JCD16 | 检查点 | 0.029 | 0.079 | -0.024 |
4.2 平面及高程精度情况

图4.1平面精度情况

图4.2高程精度情况
表4.2部分调绘点精度检查
| 点编号 | 类型 | X方向 | Y方向 | Z方向 |
| DG1 | 检查点 | -0.115 | 0.121 | -0.211 |
| DG2 | 检查点 | -0.132 | 0.138 | -0.193 |
| DG3 | 检查点 | -0.119 | 0.133 | 0.188 |
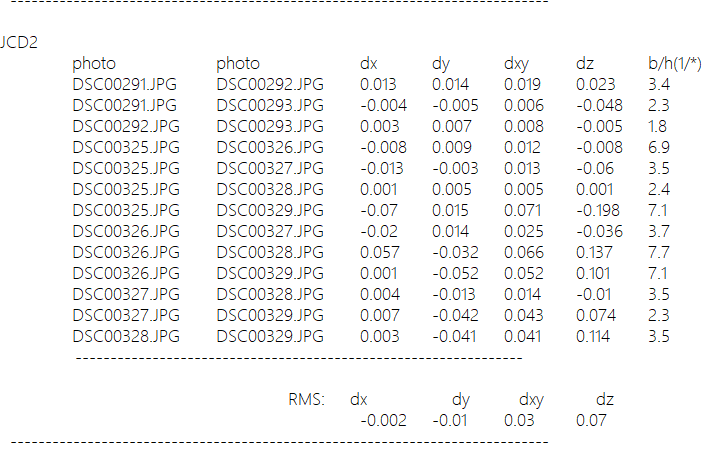
4.3 空三接边精度检查
4.3.1不同架次接边位置平面精度检查
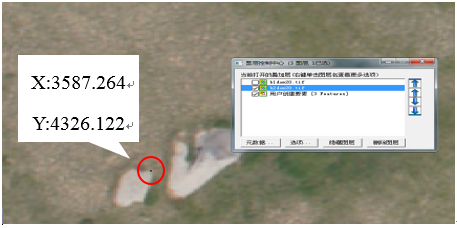
图4.3五架次接边处影像
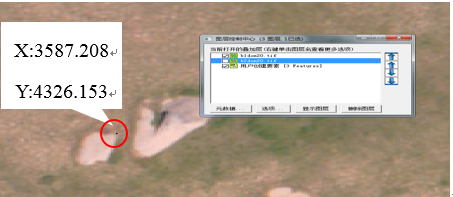
图4.4六架次接边处影像

 4.3.2不同架次接边位置高程精度检查
4.3.2不同架次接边位置高程精度检查
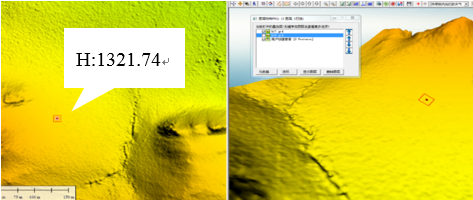
图4.5 五架次接边处数字高程模型
图4.6 六架次接边处数字高程模型 5. 成果照片5.1 线划图成果与正射影像套合图5.1 部分DOM(正射影像)及DLG(线划图) 5.2 线划图成果与数字高程模型套合
|
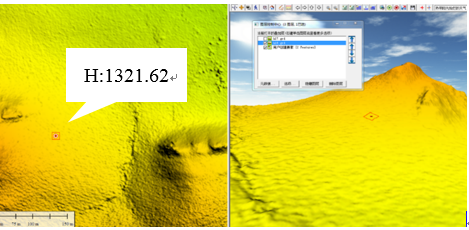
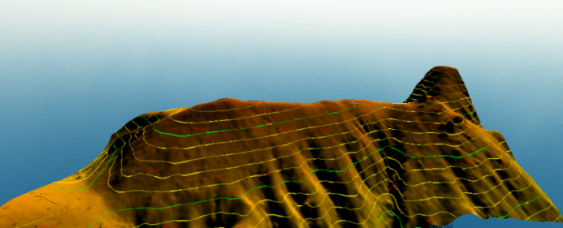
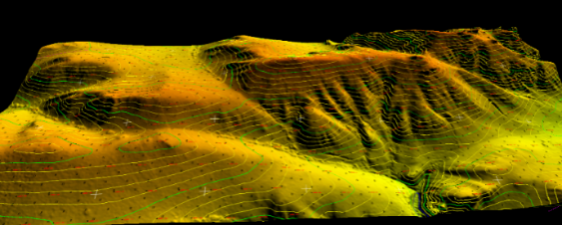
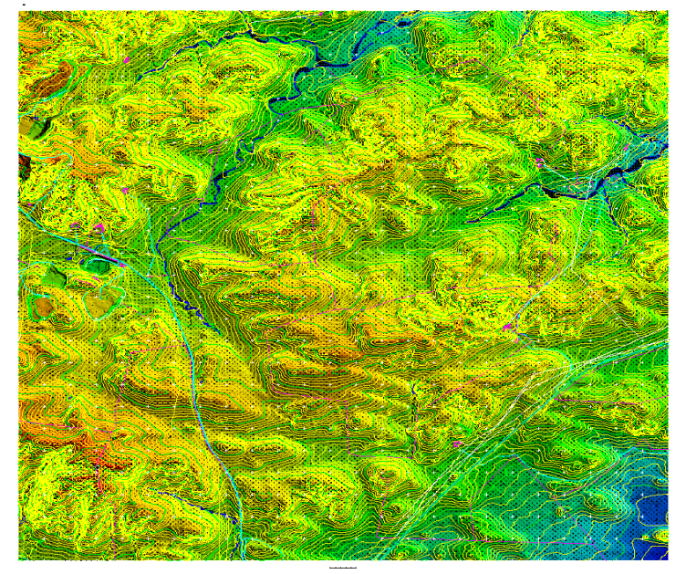 图5.2 部分DEM(数字高程模型)及DLG(线划图)
图5.2 部分DEM(数字高程模型)及DLG(线划图)6. 总结
6.1 飞马F300无人机抗风及续航性能
内蒙地区8月份平均风力在4级以上。在5级风力情况下,飞马F300无人机的飞行航时不低于1小时,航程57公里左右。在地面分辨率为8cm时,单架次作业面积在9.5平方公里左右。同时外业影像数据获取的质量稳定,各架次间的精度满足技术设计要求。
飞马无人机不但飞行效率高,而且组装过程便捷,因此在航测外业的实施过程中,单架无人机一天可飞行十架次,总面积达100平方公里。本次项目共动用了四架飞马F300无人机,实际耗时5天即完成了外业影像数据的采集任务,为内业工作争取了大量的时间。
除此之外,由于飞马F300无人机的智能化程度很高,在该项目中,飞手在外业飞行时,可以同时控制两架无人机开展作业。这些都为项目的进度提供了可靠的保障。
6.2 飞马F300在免像控中的优势
飞马F300无人机免像控效果显著,尤其本次项目需求1:2000线划图成果,经过多方面精度的检查,飞马F300无人机免像控的成果精度,完全符合设计要求。相比传统依靠地面像控点的作业方式,其节省了大量的外业像控采集的作业人员和作业时间,使得外业人员主要工作集中在外业调绘等工序中。同时免像控也大幅度提升了内业空三的作业效率,减少了空三所占用的大量时间。
6.3 无人机管家专业版影像处理的优势
无人机管家专业版对于影像畸变的处理算法,使得空三成果精度得到有效保障。且在无人干预即不手动添加人工连接点的情况下,空三通过率较高。通过170多架次的空三解算来看,无人机管家专业版一次性满足精度的通过率在98%以上。