长江空间信息技术工程有限公司(武汉)遥感数字工程院
高何利 13554208350
项目背景
项目来源
2016年底至2017年初,长江空间公司承担了安哥拉Lauca 400kV输变电线路勘测任务,应用无人机航空摄影进行1:1000大比例尺地形测图,输出DLG、DEM、DOM等测绘成果,为输变电线路设计提供测量基础数据。
测区地形复杂,植被茂密,工期要求紧,给勘测和设计工作带来了很大的困难,如采用传统测量技术导致周期长、成本较高;尤其是山区地形,交通不便、的情况下无法满足工程需要,而采用具备高机动性、低成本、高精度POS等特点的F200无人机进行测绘,则能很好的解决线路工程所面临的问题。
测区概况
测区位于安哥拉中西部的北宽扎省、南宽扎省及万博省,属于平原、丘陵地区。此次输变电项目线路长,国内无类似经验,线路总长度约为390km,宽度400米,总体南北走向,海拔由700m左右缓慢上升至1700m左右,地势相对平缓,少部分低山丘陵地带。地表植物主要是面包树、芒果树及杂草和一些灌木,其他树木较少。


图1.2.1 测区现状

图1.2.2 测区范围
精度要求
根据规范中的要求,在确保成图精度的前提下,本着有利于缩短成图周期、降低成本、提高测绘综合效益的原则在表的范围内选择。
|
测图比例尺 |
地面分辨率值(cm) |
|
1:1000 |
6~10 |
本次摄影获取的影像用于完成比例尺为1:1000的数字产品(DEM、DOM、DLG等),因此要求航空影像的地面分辨率(GSD)小于等于10cm,本次项目中采用GSD =6cm。
项目难点
(1)非洲安哥拉国外作业
本项目是我公司首次在非洲大地进行无人机航摄作业,此前有过一次在巴基斯坦小面积的航摄作业,毕竟巴基斯坦国情与非洲安哥拉有着截然不同的区别,首先是如何将无人机带出国外?安全的作业后再安全的带回国内;其次是在当地能否飞行?是否像国内一样要求进行无人机空域申请、报批等相关手续;最后就是当地的安全情况如何?有无黄热、霍乱等热带传染疾病?有无黑人抢劫等不安全情况发生。
(2)勘测线路长、精度要求高、工期短
本项目成果最终为输变电线路设计提供测量数据,并且前期做的控制测量成果也为将来的施工放样提供测量依据;线路全长390公里,且有20多公里为无人区,最终成果为1:1000精度的4D产品,在这样的地形地貌环境下达到如此高的精度要求很高;而且工期要求很短。
技术路线
工作流程
安哥拉400kV输变电线路1:1000地形图测量项目采用“F200无人机航摄+全数字航测成图法”的技术路线。由于测区地物特别稀少,所以在进行无人机航摄前布设像控点,并且在航线设计时充分考虑无人机的起降场地。技术工艺流程如图2.1所示。
技术设计
测区踏勘
基础控制测量
布标、像控测量
无人机航摄
外业检查、验收
内业空三加密
数据采集、DEM获取、断面测量
选点、埋石
内业检查验收
数字产品制作
图2.1 安哥拉输变电线航测工作流程图
精度分析
成果验收、提交
飞行方案
由于安哥拉处于南半球且测区位于高原地区,受当地气候的影响,云层比较低,考虑到航飞正是安哥拉的雨季,几乎每天都有一到两场大雨,相对高程500米以上长期有云层覆盖。所以航高设计为467米,这样既提高了影像分辨率又不受天气的影响。
沿约390公里输变电线路宽度0.6公里优于0.06米分辨率带状航空摄影,航摄面积约312平方公里;双航线设计,即:沿中心线两边布设航线,航向重叠80%,旁向重叠度55%。
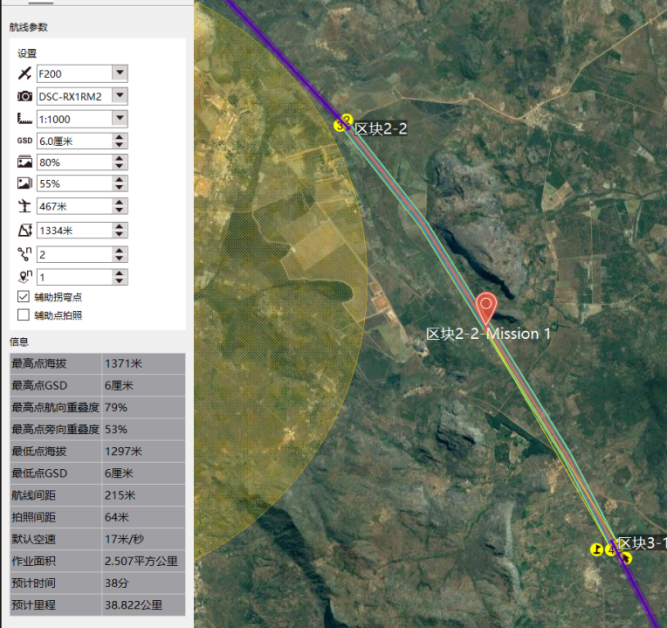
图2.2.1 带状航线设计
沿390公里长度的输变电线路附近,每间隔20公里左右选择一个较大面积平坦地区做为无人机起降场地,共需选择约20多个起降场。测区中由于过去的战争给当地留下有地雷,在选择无人机起降场地时,尽量找有当地人民耕种过的田地里或比较大的路上,不选择山地垭口或交通要道等地方,避免发生安全事故。

图2.2.2 飞行场地
控制点布设方案
每带状区块两端头在中线、两边线附近布设三个像控点,每2.5公里距离布设三个像控点、航线拐弯处加布三个控制点。
由于当地人烟稀少,测区中有大面积沼泽地,人员很难进入,为了不影响像控精度,对像控点布设进行优化调整,像控点布设在沼泽地的两头,这样可以跨过沼泽地,避免人员进入沼泽地中。由于测区很少有明显的地物可选像控点,所以采取航拍前在地面上刷标记布控的办法,很好的解决了无法选刺像控点的问题。

图2.3.2 像控点布设
像控点测量
测区采用GPS实时动态定位(RTK)的方法进行测量,每个点重复测量两次取平均值作为测量成果。

图2.4.1 像控点测量
基站架设
基站架设在航摄区块半径20公里范围内,飞行前30分钟开机、飞行后30分钟后关机。

图2.5 基站架设
飞行实施
此次任务由于我公司是第一次在海外大任务量飞行,又是第一次长距离线路飞行,在国内也无飞行经验,对航摄飞行线路设计、无人机飞行、以及数据处理等都无成熟的作业模式,所以在国内出发前就对航摄飞行工作中的重点和难点进行研究,制定了合理的无人机飞行方案与周密的工作计划。
飞行参数
采用飞马智能航测系统F200进行航摄。具体参数如下:
表3.1 F200航摄参数
|
航摄时间 |
2017.2.29 |
快门速度 |
1/1250秒 |
|
航摄相机 |
SONY RX1R II |
光圈大小 |
5.6 |
|
像元大小 |
4.5µm |
ISO |
Auto (100~800) |
|
镜头焦距 |
35 mm |
飞行里程 |
41公里 |
|
相对航高 |
467米 |
飞行时间 |
39分钟 |
|
地面分辨率 |
6.0厘米 |
拍摄像片 |
396片 |
飞行操作
由于是带状航线,所以起降场地尽量选择在两架次接头处,这样一个飞行场地可以飞行两个架次,避免飞行完一架次进行赶路前往一下场地浪费时间,同时也节约了无人机航程,保证无人机电池有足够的电量,同时飞行前一天晚上充足电量保证第二天飞行满电,
数据处理
数据在无人机管家2.0中进行处理,采用基于差分GPS 的“PPK+控制点”解算模式,极大减少了控制点,流程如下。
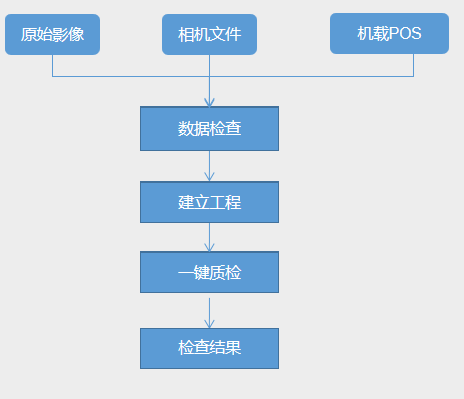
图4.0 质检流程
在数据检查完之后,通过质检报告,可见测区拼图是否存在漏洞,重叠度正常与否;通过智理图中高精度差分解算生成POS数据;将POS数据通过参数转换为当地坐标系统;最后进行空三工程建立,量测控制点后平差生成空三成果,检查精度是否合格,如精度合格则进行后续测图及成果输出。
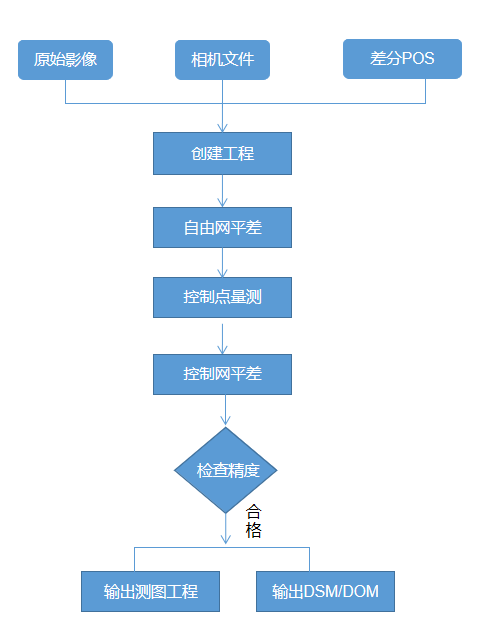
图4.1 空三及成果输出流程
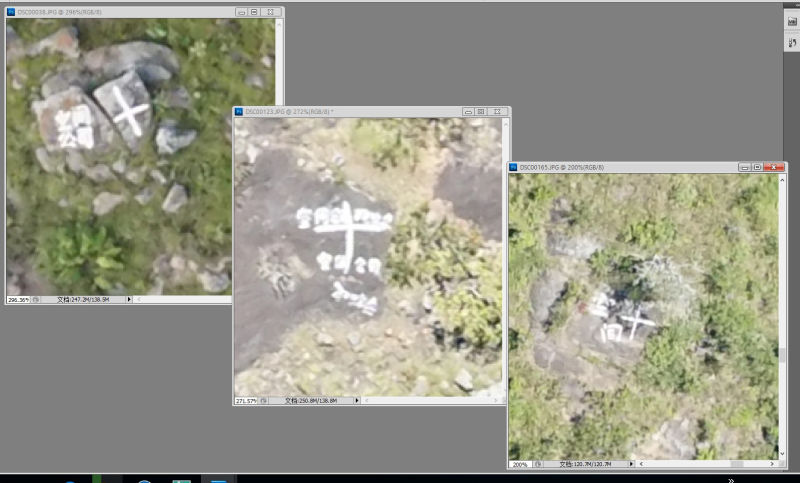
图4.2 像控点航摄影像
空三精度
经过空三平差得到如下精度:
|
空三加密精度统计表 |
||||
|
ID |
TYPE |
DX |
DY |
DZ |
|
10 |
XYZ |
-0.067 |
-0.005 |
0.174 |
|
11 |
XYZ |
0.026 |
0.008 |
0.013 |
|
12 |
XYZ |
0.007 |
0.028 |
-0.046 |
|
43071 |
XYZ |
-0.04 |
-0.019 |
-0.051 |
|
B4-04 |
XYZ |
0.003 |
0 |
0.025 |
|
B4-05 |
XYZ |
0.016 |
-0.002 |
-0.022 |
|
B4-07 |
XYZ |
0.004 |
0.011 |
-0.022 |
|
B4-09 |
XYZ |
-0.004 |
0.011 |
0.027 |
|
B4-11 |
XYZ |
0.003 |
-0.004 |
-0.053 |
|
B4-12 |
XYZ |
-0.001 |
0.005 |
0.02 |
|
B4-13 |
XYZ |
0.003 |
0.006 |
-0.036 |
|
B4-14 |
XYZ |
-0.003 |
-0.005 |
-0.023 |
|
B4-16 |
XYZ |
-0.002 |
-0.012 |
-0.035 |
|
B4-17 |
XYZ |
0.01 |
0.007 |
0.059 |
|
B4-20 |
XYZ |
0 |
0.002 |
-0.036 |
|
B4-21 |
XYZ |
-0.012 |
-0.001 |
-0.028 |
|
43009 |
CHK |
-0.084 |
0.066 |
0.212 |
|
43040 |
CHK |
0.076 |
-0.033 |
-0.217 |
|
43070 |
CHK |
-0.013 |
0.044 |
-0.24 |
|
B4-06 |
CHK |
0.084 |
-0.023 |
0.378 |
|
B4-08 |
CHK |
0.017 |
-0.001 |
0.132 |
|
B4-10 |
CHK |
0.007 |
0.037 |
-0.135 |
|
B4-15 |
CHK |
-0.019 |
0.022 |
0.003 |
|
B4-18 |
CHK |
-0.015 |
-0.044 |
0.053 |
|
B4-19 |
CHK |
0.006 |
-0.009 |
0.187 |
|
定向点平面中误差:±0.13,高程中误差:±0.06 |
||||
|
检查点平面中误差:±0.23,高程中误差:±0.20 |
||||
可见结果满足GB/T 23236-2009 《数字摄影测量空中三角测量规范》规定的1:1000空三精度。
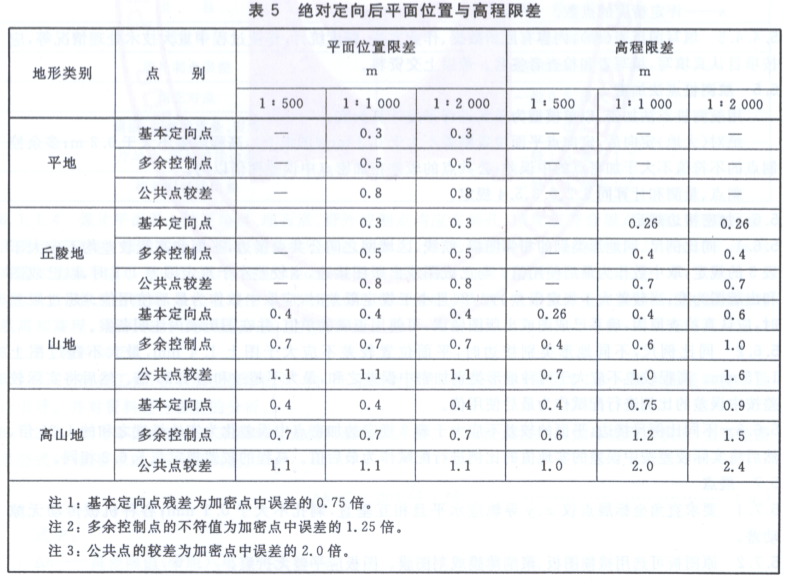
图5.1.2 规范限差
立体采集
数据采集
通过空三后导出Inpho结果转为ZI成果,在航天远景摄影测量工作站中导入ZI空三结果进行立体采集,如下图所示:
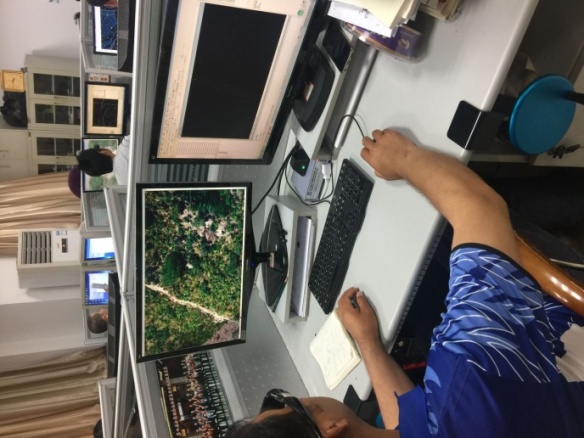
图6.1.1 航天远景立体采集
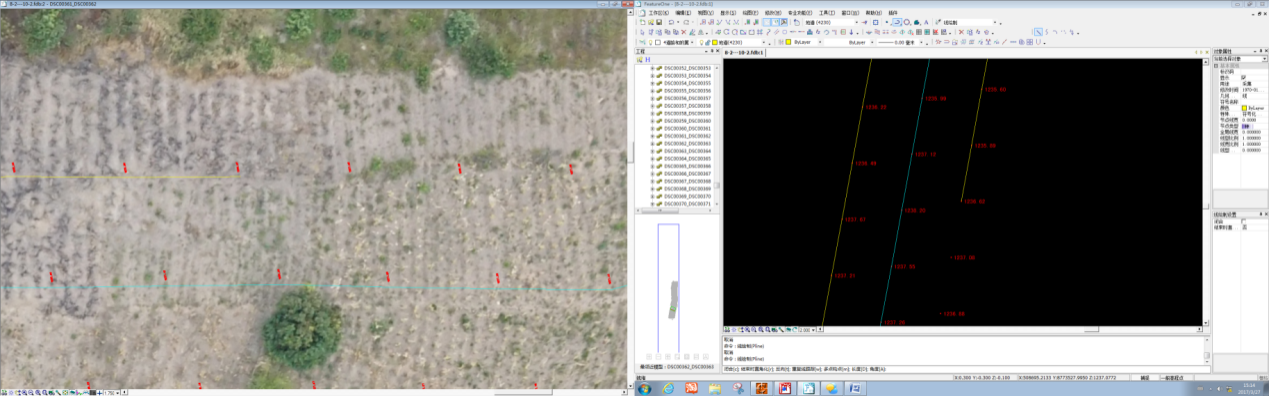
图6.1.2 航天远景采集数据
精度检测
通过外业散点与立体模型观测对比,应用检查程序统计精度如下:
地物点平面精度检查表
点名 X0 Y0 Z0 X1 Y1 Z1 dx dy ds
————————————————————————————
P22, 95077.475,456160.223,22.777, 95077.198,456159.731,23.593,0.277,0.492,0.565
P21, 95935.350,456071.850,18.986, 95935.415,456071.870,21.499,-0.065,-0.020,0.068
P19, 95078.070,456122.548,21.851, 95077.898,456122.721,24.232,0.172,-0.173,0.244
P18, 95933.002,456104.274,20.249, 95933.219,456104.352,22.365,-0.217,-0.078,0.230
P17, 95896.651,456200.889,20.348, 95897.010,456200.993,22.475,-0.359,-0.104,0.374
P16, 95836.015,456260.885,20.252,95835.716,456260.870,22.894,0.299,0.015,0.299
P15, 95597.522,456378.630,22.537,95597.021,456378.715,23.551,0.501,-0.085,0.508
P13, 95106.522,456132.602,23.334,95106.524,456132.497,25.094,-0.002,0.105,0.105
P12, 95104.071,456064.788,21.450,95103.973,456064.796,21.866,0.098,-0.008,0.098
P11, 95929.380,456108.452,20.282,95929.551,456108.496,22.582,-0.171,-0.044,0.176
P10, 95891.699,456205.916,20.364,95892.030,456205.851,22.475,-0.331,0.065,0.337
P9, 95822.774,456265.515,20.500,95822.502,456265.622,22.894,0.272,-0.107,0.293
P8, 95771.839,456285.223,21.200,95771.661,456284.986,0.000,0.178,0.237,0.297
P7,95593.425,456394.582,20.671,95593.126,456394.883,23.243,0.299,-0.301,0.424
P6, 95393.052,456415.115,18.808,95393.320,456415.196,20.451,-0.268,-0.081,0.280
P5, 95213.684,456457.061,19.606,95213.675,456456.791,21.748,0.009,0.270,0.270
P4, 95876.747,456695.178,22.645,95876.661,456694.825,33.347,0.086,0.353,0.363
P3,95746.130,456743.689,22.126,95746.372,456743.730,24.454,-0.242,-0.041,0.245
P2,95726.072,456673.155,23.670,95726.106,456672.882,26.479,-0.034,0.273,0.275
P1,95489.970,456895.236,24.197,95489.727,456895.360,27.590,0.243,-0.124,0.273
————————————————————————————
平面差值最大点 P22 最大值 0.565
平面差值最小点 P21 最小值 0.068
检查点数 : 20
平面中误差 : ±0.311
特征点高程精度检查表
点名 X0 Y0 Z0 X1 Y1 Z1 Dz
———————————————————————
G21,95172.031,456464.968,20.227,95173.804,456464.020,20.495,-0.268
G20,95927.495,456477.976,15.552,95927.495,456477.976,15.552,0.000
G19,95764.474,456294.294,21.349,95763.717,456295.178,21.154,0.195
G18,95573.887,456414.334,18.752,95569.711,456415.647,19.095,-0.343
G17,95328.799,456454.894,19.850,95330.988,456454.585,19.900,-0.050
G16,95926.464,456522.327,15.881,95924.324,456523.976,16.232,-0.351
G15,95752.326,456743.239,22.227,95753.034,456742.824,22.242,-0.015
G14,95702.568,456993.970,21.716,95703.560,456994.258,22.000,-0.284
G13,95084.469,456155.569,22.230,95086.228,456155.468,22.100,0.130
G12,95936.157,456031.822,18.013,95937.079,456032.051,18.090,-0.077
G11,95902.329,456198.497,20.242,95902.688,456197.065,20.102,0.140
G10,95862.194,456238.060,20.044,95862.954,456236.709,20.220,-0.176
G9,95799.084,456280.168,21.539,95802.729,456278.180,21.553,-0.014
G8,95721.209,456323.200,20.181,95714.627,456327.607,20.242,-0.061
G7,95493.811,456419.606,17.544,95490.630,456420.240,17.580,-0.036
G6,95231.895,456455.725,20.299,95235.017,456456.140,20.250,0.049
G5,95889.755,456693.074,22.239,95889.969,456693.269,22.410,-0.171
G4,95825.239,456751.404,23.377,95823.454,456751.854,23.605,-0.228
G3,95721.629,456670.915,22.395,95722.194,456670.629,22.540,-0.145
G2,95378.736,456893.455,25.833,95381.107,456891.053,25.660,0.173
G1,95605.569,456908.427,23.065,95606.675,456902.859,23.140,-0.075
———————————————————————
高程差值最大点 G16 最大值 -0.351
高程差值最小点 G20 最小值 0.001
检查点数 : 21
高程中误差 : ±0.176
通过以上分析检查平面中误差为±0.311,高程中误差为±0.176都能满足规范要求。
数据应用情况
本次项目生产的数据有:(1)1:1000地形图(2)线路纵横断面(3)数字高程模型(4)正射影像图。
在电力选线软件平台上,将DEM和DOM叠加显示,构成线路路径走廊的三维场景,在场景中,利用各种工具进行三维选线,实时量测各种危险地物距离线路中心的距离,对线路路径进行各种修改,设计人员从不同的视角查看线路周围的地物、地貌特征,量测各种有影响的地物距离线路的距离,通过放大、缩小、漫游看到全路径的地形条件,综合考虑沿线的交通运输、施工和运行维护的难易程度、对地物的影响及受地形的影响等,并可进行杆塔位置和高度的精细调整,使整条线路得到进一步优化,从而使线路走径更合理更经济,对附近环境和居民的影响降低到最小,完成线路路径的初选。
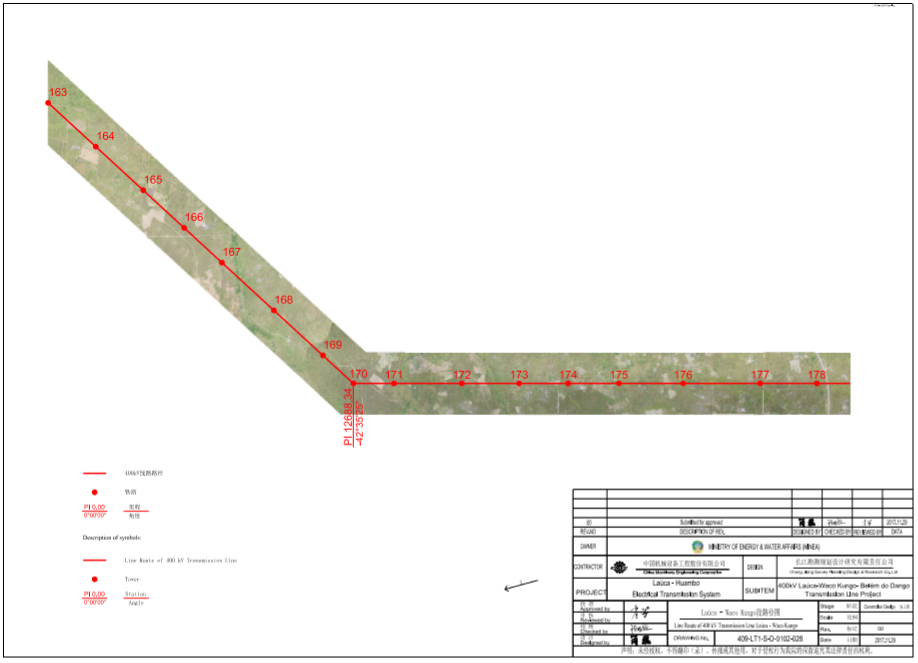
图7.1.1 路径图
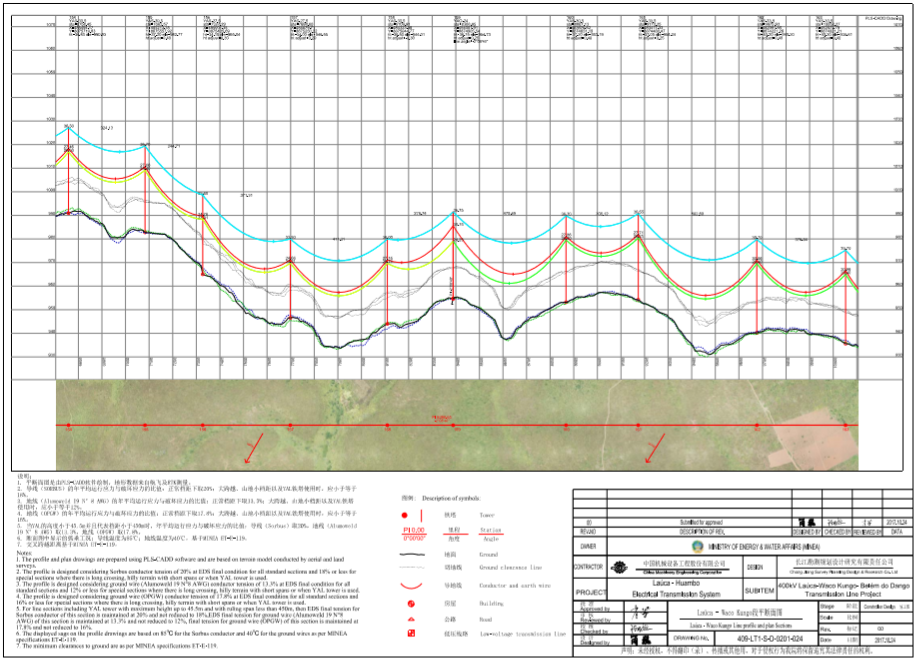
图7.1.2 平断面图
以上数据为项目线路规划、设计方案调整提供现时可靠的资料;并为输变电线路勘测节约了大量时间,加快了工程设计,为设计人员提供更全面的测绘资料。无人机航测新手段比传统外业测绘在国外作业条件困难的情况下显示出较大优势,节约大量的人力、物力、成本,且提高测绘成果质量。
总结
无人机航测
(1)本项目成功应用无人机航测在国外输变电线路勘测提供先进的技术手段,精度完全能满足项目要求;与传统方法相比节约了大量的人力物力财力。此方法在以后类似项目上都可采纳。
(2)由于输变电线路是带状测区所以在无人机飞行航线设计时采用往返航线的飞行线路,并且在飞行架次设计时充分考虑每架次线路的长度,尽量架次之间接头处选在转弯处,这样既有利于飞行也有利于数据处理。
(3)线路上大多数是安哥拉高原,植被茂密,地物稀少,所以像控点用提前布标的方式进行,并且选择带差分GPS的无人机,这样既提高了空三精度又减少了像控点个数。
(4)安哥拉位于南半球,这也是F200首次在南半球航飞,遇到了无人机无法正确定位。经我们反馈,与飞马技术人员共同找到问题原因,现场反复验证,及时更新了无人机管家,保证了F200无人机能在南半球的正常飞行。
无人机国外作业相关工作
(1)无人机在运输出国时应在国内做足准备工作,尽量多了解当地有关规定,与当地业主联系好出关相关手续,携带好无人机的购买发票、无人机参数、无线电频率等资料。当时我单位没有携带无人机出国经验,所以在出关时遇到很多的麻烦,耽误了大量的作业时间和花费了许多金钱。在携带飞马电池登机时也遇到了不少麻烦,因为国外的航空公司与国内的很多规定不一样,所以在出国前一定多了解一些情况。
(2)本项目属于我国对安哥拉援建项目,也是第一次在安哥拉使用中国的无人机,他们也是感到很新奇,在报请空域及地面治安警察都是一路绿灯(当然我们是送了礼物的),唯一要求就是我们飞行时要带他们观看,所以我们飞行时都要给空管、警察、扫雷部队带上面包饮用水等,他们都很高兴,怎么飞都可以。
(3)这次用无人机航测,业主、设计人员都高度评价了这种方法效率高,不仅有数据,还有高清影像图,对输变电线路的调整更加直观科学。当地类似的工程采用传统方法进行需要20人半年的时间,而我们分两次每次2人两个月就完成了。
(4)工作区域还有十年前内战遗留大量的地雷,用无人机测量最大的减少了地面人员,避免了人员被炸危险,期间在线路上的一个中国水电项目就有工作人员踩雷事故发生,所以在国外作业时一定要注意安全。

图10 安哥拉航空管理局检查无人机
