| 投稿单位:
黑龙江精臻科技发展有限公司 投稿人:孟祥宇 2018年10月30日 |
一、任务概要
1、项目概述
随着倾斜摄影技术的快速发展,如何利用建立的实景三维模型生产大比例尺地形图(1:500比例尺),进一步拓展成果应用领域成为行业要探索的一个问题。我公司在积累了相关生产试验的基础上,为了进一步验证此项技术的可行性,在宝清县五九七农场农房调查项目支撑下,利用飞马D200多旋翼无人机搭载倾斜模块进行低空高分辨率倾斜摄影与大比例尺测图生产。
2、项目区域
本次项目测区位于S205道路东侧,测区面积0.4km2,地势平坦,地面要素主要为居民地与道路等,测区范围如下图所示。

项目范围线
3、项目实施
3.1人员投入
3.2仪器设备
本项目采用飞马D200多旋翼无人机挂载倾斜五镜头模块进行测区倾斜摄影测量数据的采集。
| 名称 | 说明 |
| 定位系统 | GPS:L1+L2(20Hz)
BeiDou:B1+B2(20Hz) GLONASS:L1+L2(20Hz) |
| 差分模式 | PPK/RTK及其融合作业模式 |
| 有效像素 | 1.2亿(2400万)×5 |
3.3实景三维建模
数据处理采用ContextCapture(以下简称CC)软件进行倾斜航空影像数据处理,生产实景三维模型及真正射影像。以下为建模所用硬件配置表:
| 计算机 | 系统 | CPU | 显卡 |
| 工作站节点(4台) | Windows7 | i7-6900k 128G RAM | GeoFroce GTX 1080 |
3.4测图软件
利用DP-Modeler大比例尺测图软件,可以实现利用倾斜摄影技术获取的影像数据进行高精度的大比例尺矢量采集工作。无需佩戴立体眼镜,根据影像所见即所得的定位地物要素的三维信息,在软件中进行点、线、面等矢量信息绘制,采集同时赋予要素的国标编码,矢量成果可导出多种数据格式并应用。
3.5项目成果
a、测区实景三维模型一套(数据格式为.osgb);
b、测区真正射影像图一套(数据格式为.tif);
c、测区大比例尺地形图测图成果一套(数据格式为*.dwg)。
二、工作实施情况
项目实施分为数据采集、数据预处理、数据生产等三个阶段,并对成果进行精度检测,最后通过投入的人力与制作周期对整个项目进行效率分析。
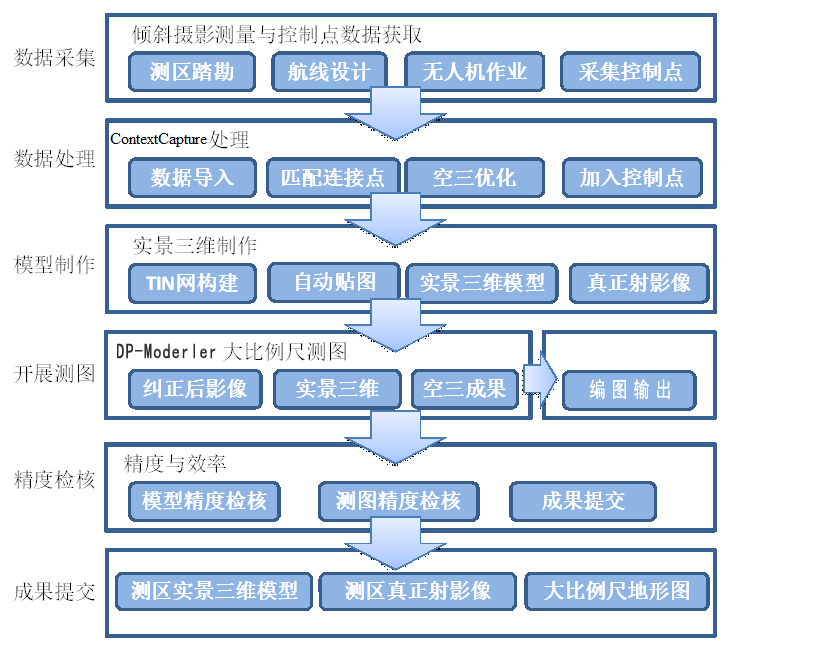
项目技术路线图
1、数据采集
1.1、航飞情况
按照1:500大比例尺测图的精度要求,结合测区实地建筑特点,设计地面分辨率0.017米。航线设计采用沿测区边界外扩3条航线进行航飞,飞行时间共计2个架次,有效飞行面积约0.4平方千米。任务区内主要为1-7层居民建筑和围墙、道路等要素,设计飞行高度为108米。飞行期间为晴天,通视条件良好。

无人机作业现场图

pos点位置示例
本次飞行数据采集顺利完成,前后左右下等五镜头影像质量良好,曝光与颜色饱和度正常、飞行轨迹正常,影像旋偏角控制在6度范围内,航向重叠与旁向重叠率控制在70%以上,满足数据生产要求。
1.2、航摄参数
此次航飞的总体技术情况如下表所示:
| 飞行架次 | 2 |
| 地面分辨率 | 0.017米 |
| 摄区面积 | 0.4平方公里 |
| 影像重叠率 | 航向、旁向>70% |
| 影像旋偏角 | < 6 ° |
| 相对航摄高度 | 108m |
| 倾斜影像格式 | JPG |
| POS数据格式 | TXT |
| 倾斜数据容量 | 137G |
1.3、倾斜摄影数据情况
本次项目共获取测区0.4平方公里测区倾斜影像3490张,数据范围满足测区制作的需要,无遗漏、无缺失;影像清晰,层次丰富,色调均匀,反差一致;无严重噪声;无扭曲;影像边缘均匀;无云、雾、烟覆盖。影像无质量问题,对应POS信息齐全。
| 测区 | 架次 | 影像/张 | 传感器尺寸 | 焦距/mm | 分辨率/cm | 测区面积/km2 |
| S205道路东侧测区 | 2 | 3490 | APS-C(23.5×15.6mm) | 25/35 | 1.7 | 0.4 |
1.4、控制点与检核点选取
控制点资料为外业人员在测区范围内获取15个点位的像控信息,坐标系为CGCS2000。选取其中12个点作为控制点参与实景三维空三加密控制,其余3点位进行模型成果精度检测。

控制点与航线叠加图

控制点展点图
2、数据预处理
2.1、资料检查
倾斜影像检查:
通过对测区3490张影像逐一进行检查,结果如下:数据范围满足项目最终成果范围的需要,没有波段丢失、范围不全的问题,提供外业飞行资料完整无缺失。影像清晰,层次丰富,色调均匀,反差一致;无严重噪声;无严重扭曲、旋偏角控制在合理范围内;影像边缘均匀;无云、雾、烟覆盖。根据《测绘产品质量评定标准》等相关规范,测区范围内所接受检查的原始资料数据均在合格范围内。
POS数据检查:
对导出的POS信息进行分析,飞控系统角元素(OPK)描述合理,与GPS(XYZ)和同步曝光点位形成唯一对应关系。经过校正地磁参数的修正,所得数据与地方平均高程一致,满足处理需要。在ContextCapture中进行展点分析,影像方位无差错,航线内与航线间的影像排序正常。
飞行质量检查:
检查结果:按照国家目前航摄及成图标准,航向重叠度与旁向重叠度满足测区覆盖要求,无绝对漏洞和相对漏洞,实际航高与设计航线之差不大于10米。符合标准规范的要求。
控制点检查:
通过内业检查,控制点文件名称、数据格式、数据组织、数学基础正确,成果完整;GPS测量精度满足成图精度要求;图形图像控制点采集精度满足技术规范要求;像控等文档资料齐全,符合国家标准规范。
2.2、空三加密
- 数学基础:大地坐标系与大地高程基准为WGS84,由于无人机POS采用WGS84坐标系统,因此通过参数信息向其他坐标系进行转换,再生产CGCS2000的实景三维模型成果。
2)倾斜数据空三加密:设置好倾斜影像与POS数据的对应关系后,导入ContextCapture进行空三加密操作。
a、整体匹配连接点,初步形成正确率为50%以上的空三格网;
b、通过空三残差报告,在加密点不稳定、精度不高的格网中进行人工干预处理,手动去掉残差较大的错点;
c、在空三格网正确率大于80%之后,通过条件过滤、设定优化步长等操作,将空三结果控制在约束范围内(平面最大误差<4像素,平面中误差<0.4像素,平均偏差趋近于0),此时数据具有合格的相对精度,形成空三结果。
3)加入控制点:为保证模型成果的绝对精度,在空三结果基础上加入控制点,手动调整控制点位置信息,将控制点网与空三网联合平差,优化至合格数值,可进行自动化建模作业。
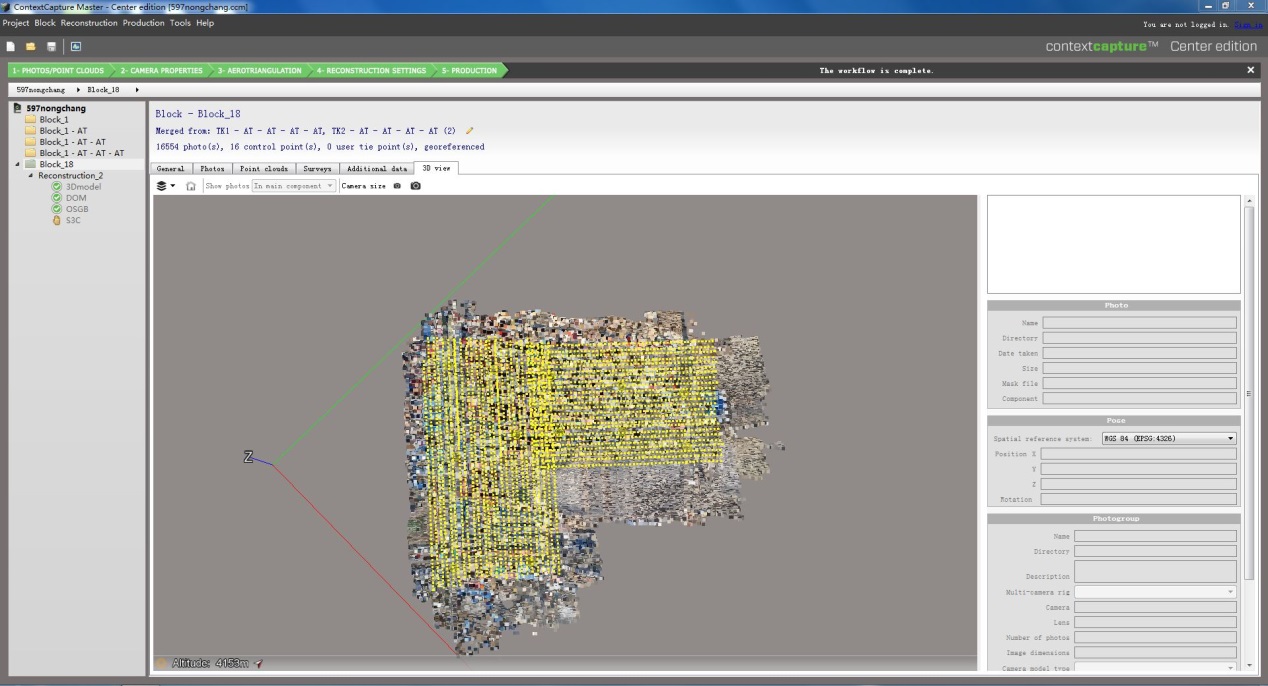
空三成果点云示例
3、数据生产
3.1、实景三维模型生产
将空三成果导入ContextCapture软件,通过划分模型格网,采用工作站集群同步生产模型数据。经过像对匹配、形成格网、设定格网大小、自动贴图、坐标转换等流程,生产出测区的实景三维模型成果,详细如下:

测区实景三维模型成果


模型细节图
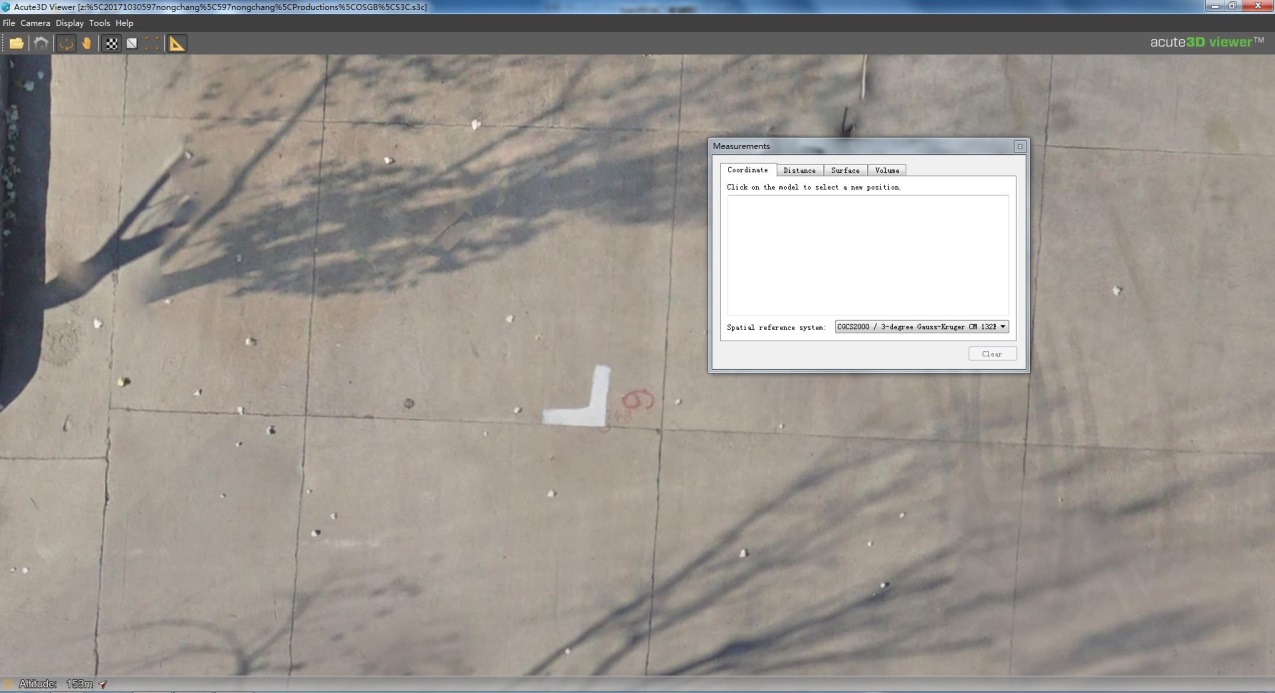
单点坐标量测
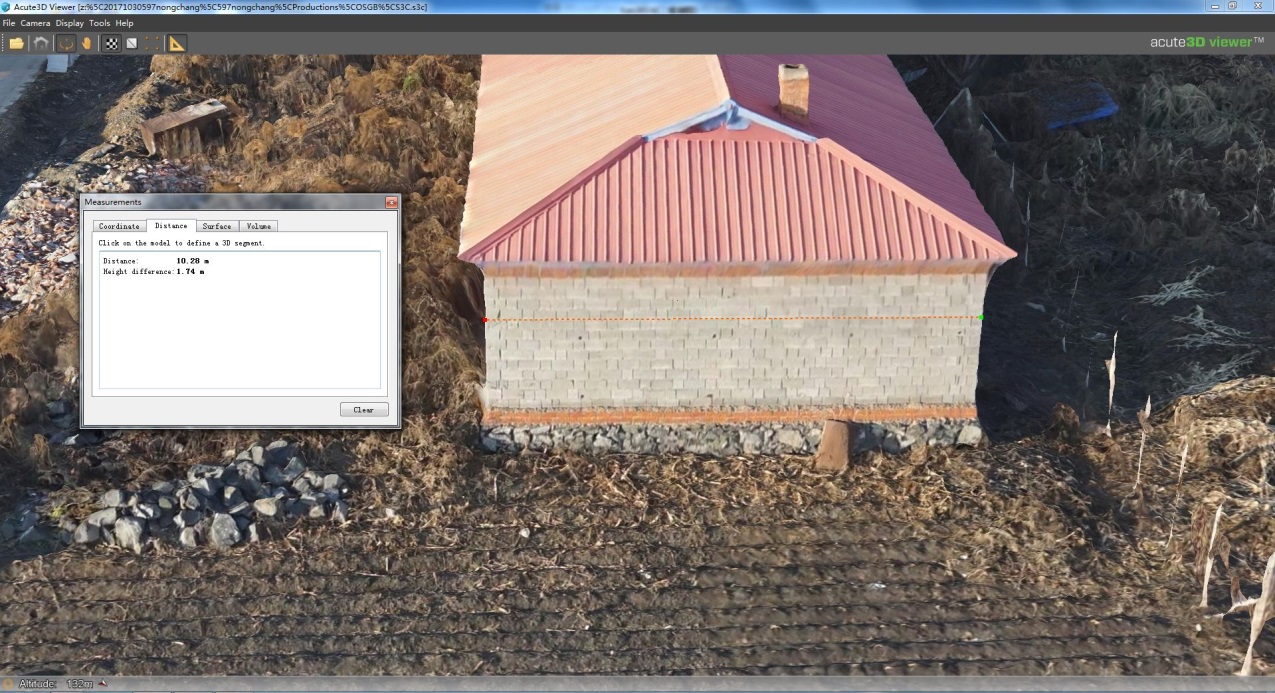

房屋长度、体积量算
3.2、测区真正射影像制作
根据实景三维模型与空三成果文件,以Tile为单位进行格网正射与贴图匹配处理,制作测区真正射影像(TDOM)。
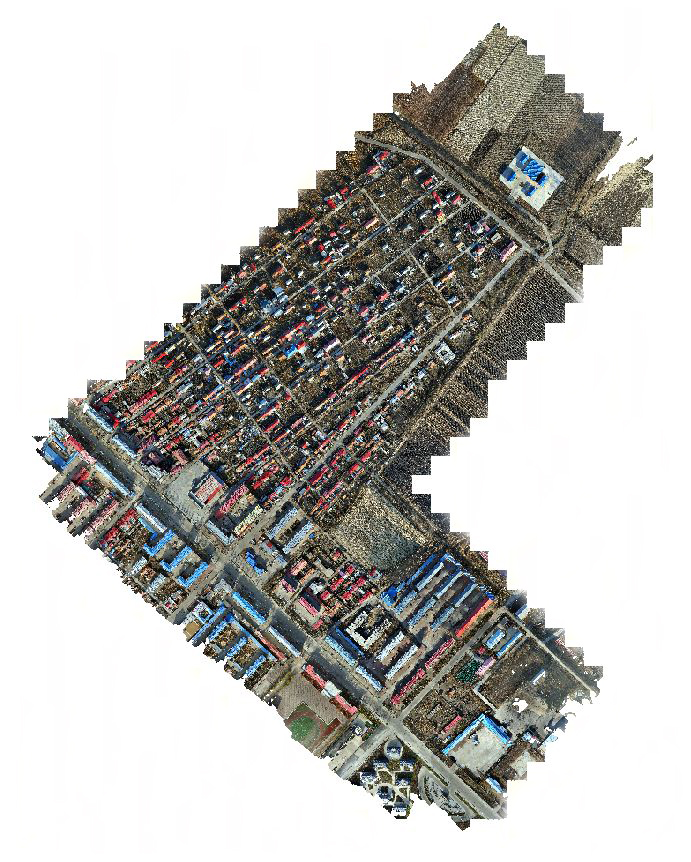
测区真正射影像图
3.3、内业测图
完成S205道路东侧测区实景三维模型、空三成果、纠正畸变差影像等数据的制作,采用DP-Moderler测图软件对以上数据进行导入,制作工程文件,由作业员在工程中进行点、线、面测图,并按照国标要求赋予图层与属性信息。测图成果为初级线划图,经软件导出为cas格式,采用进行图形数据编辑,生产1:500制图数据。

DP-Moderler测图软件
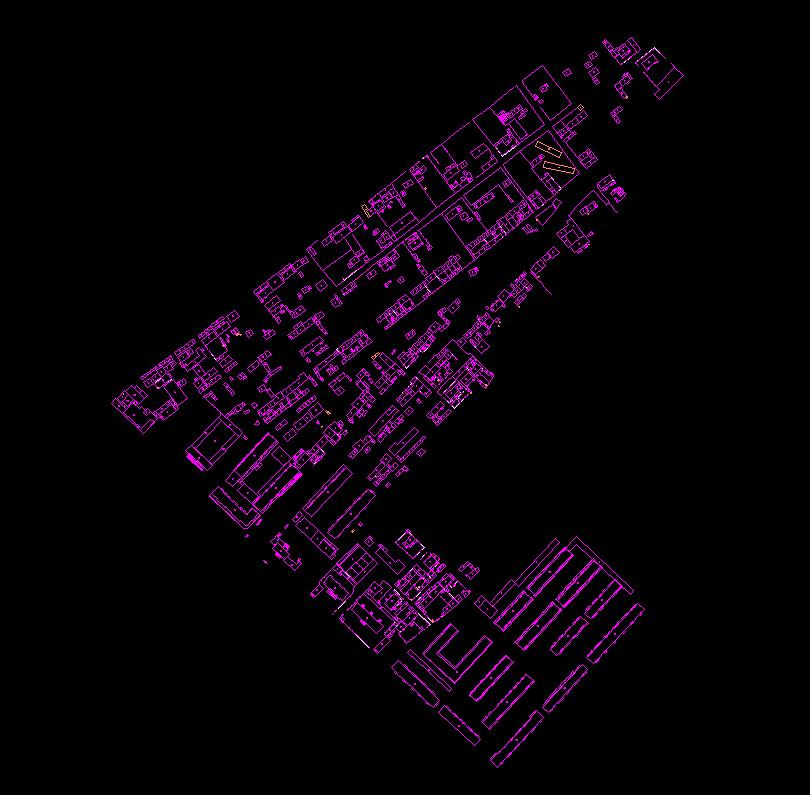
测区1:500测图成果
3.4、精度检测
成果完成后,需进行精度检测工作,采用数据抽检的手段,用人工检查核对和人机交互检查相结合的方式对测区的测图成果质量进行检测。第一,将测区DLG线化图合并至实景三维模型中进行平面精度检测;第二,根据测区已有大比例尺地形图资料,检测实景三维模型、大比例尺测图成果的相对精度;第三,在测图成果中随机选取5处区域,根据区域内测得要素由外业人员进行实地测量,与测图成果比较。
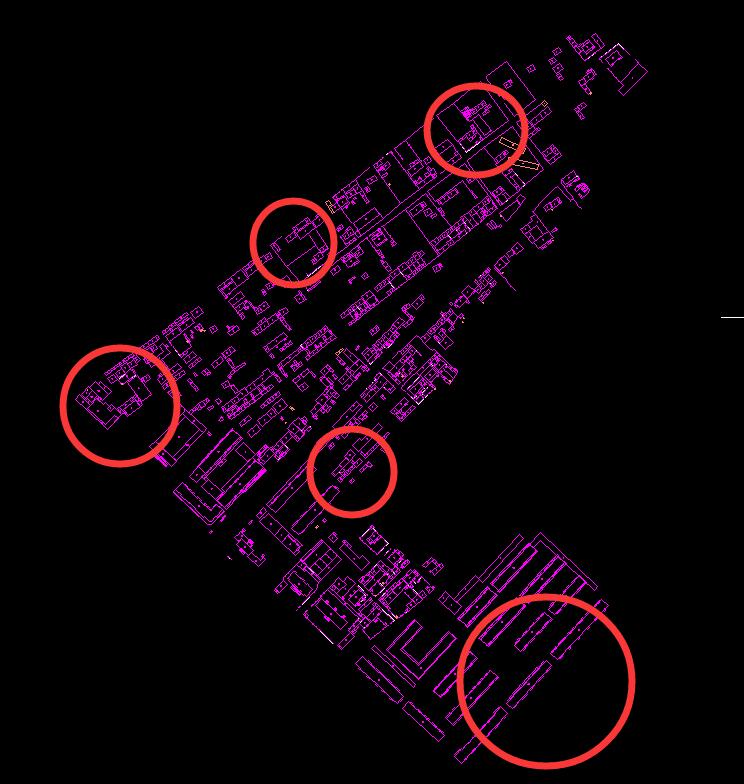
外业实测抽样检测区
3.5、整体解决方案的优化
影响测图成果质量的因素有两个:精度和作业效率。以下是针对两要素进行技术解决方案的探讨与优化。
保障成果精度
首先,从技术路线来看,成果的来源是“倾斜摄影数据获取->数据处理->空三->建模->测图”,因此影响精度的最根本因素是航飞质量。只有高质量、高精度的倾斜摄影航片才能生产出高精度的实景三维模型,在此基础上才能获得好的测图成果。理论上航高越低越有利于保证精度,但低航高带来的航线数量成倍增加,导致影像成倍增加,会为内业处理带来很大负担,因此要选取合适的航高作业。
提高作业效率
在作业步骤上,可大致分为三个环节:航飞数据获取,实景三维模型生产、测图与编图。各工序为上下级关系,不能并行处理,因此提高每一步的工作效率都将对整体作业效率带来提升。
航飞数据获取:根据温度情况,冬季比夏季作业时间每架次短5-10分钟,因此夏季飞行时间虽然长,但植被较茂盛,覆盖度高,因此还需根据具体项目需要做取舍。
经研究与实验,数据导入阶段可通过采用万兆网线等硬件提升导入速度,减少一定的时间。而整个空三阶段决定了数据的处理精度,不能随意减少系统既定的迭代次数,因此无法优化。待到建模阶段,可根据测图要求缩小建模范围,分为若干区块,每一区块生成后即可进行测图,不让整个建模过程拖慢测图进度。
测图与编图:虽然作业员需具备一定的基础测绘作业经验,但测图软件DP-Moderler上手较容易,在操作流畅的前提下,能够准确将地物要素进行国标分类、分层与标注,以加快编图速度。因此,整体测图速度能够随着作业员的熟练度而提升。
三、经验和体会
技术特点与优势:本项目采用测绘领域最新的飞马无人机倾斜摄影测量技术,充分利用倾斜摄影的自动化空三与建模优势,能够在较短的时间生产高质量、高精度的模型成果基础上,进行大比例尺(1:500)地形图测绘工作,技术路线可行,产品精度符合相关标准规范要求。将以往需要全野外测绘的测图工作转变为内业加部分外业调绘,可大量减少外业人员劳动强度,外业采集更自主、更高效。整体效率预期将优于传统测绘方式。
应用领域:基于低空高分辨率倾斜摄影生产的实景三维成果与真正射影像均为测绘级产品,可为国土空间规划、土地确权、城市网格管理、不动产登记等工作提供客观、真实、时效性强的基础地理信息数据,对于相关工作将起到极大的推动和促进作用。本技术在获取测图成果的同时,将一并获得实景三维模型、真正射影像、数字表面模型(DSM)等成果,该成果构成了数字城市、智慧城市建设的基底数据,在此基础上可研发各种系统应用,性价比较高。
局限性:无人机倾斜摄影测图方法具有两个局限性,第一是航飞范围较小,由于镜头、电池等硬件能力所限,要达到0.02米以上测图精度需飞至100米以下,较多的架次使航片增多,导致建模效率低。该问题将随着镜头像素的提升与电池续航能力的提高而逐步解决。第二是遮挡问题,由于倾斜镜头与下视镜头呈45°夹角,因此拍摄时树冠的冠幅会遮挡部分地面要素,影响测图判读。因此该技术较适合在秋冬季落叶后或植被较稀疏地带的测图任务。
四、结论
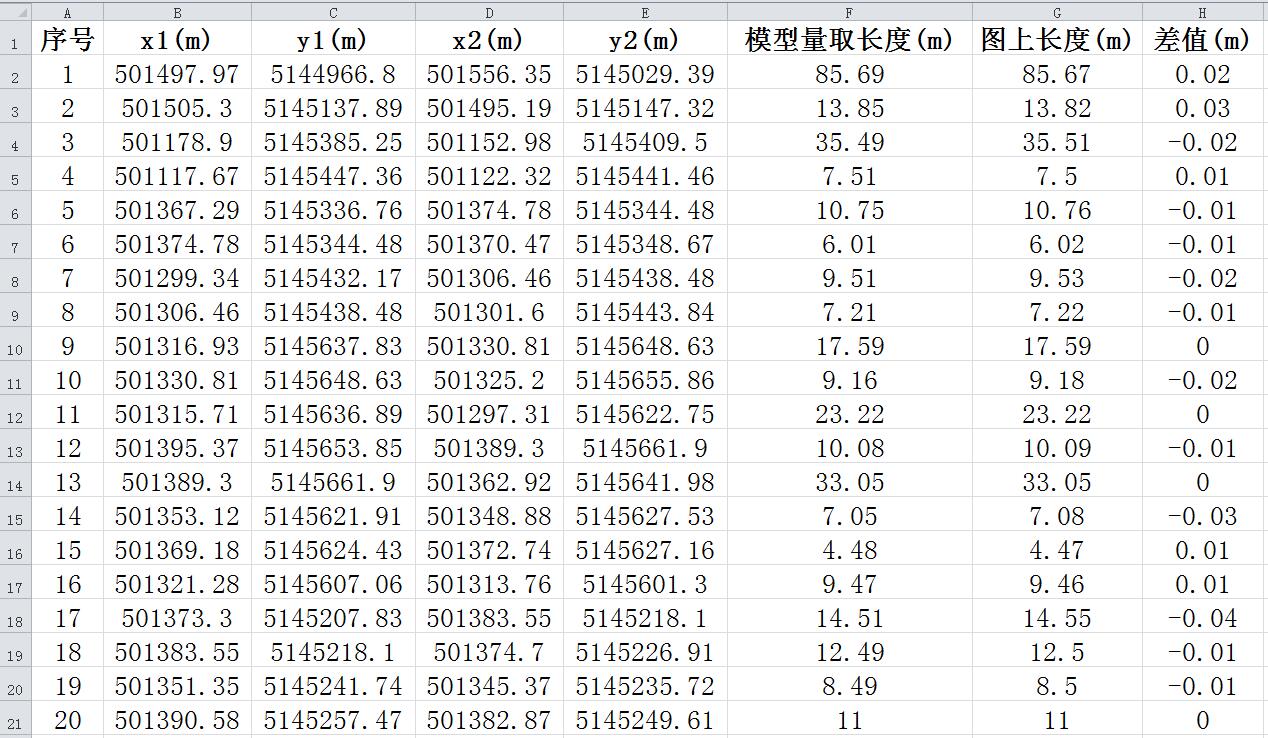
经验证,本次成果精度满足要求,地理要素表示合理。采用飞马无人机倾斜摄影配合DP-Moderler软件方式进行测图技术路线可满足城市1:500大比例尺测图精度要求。
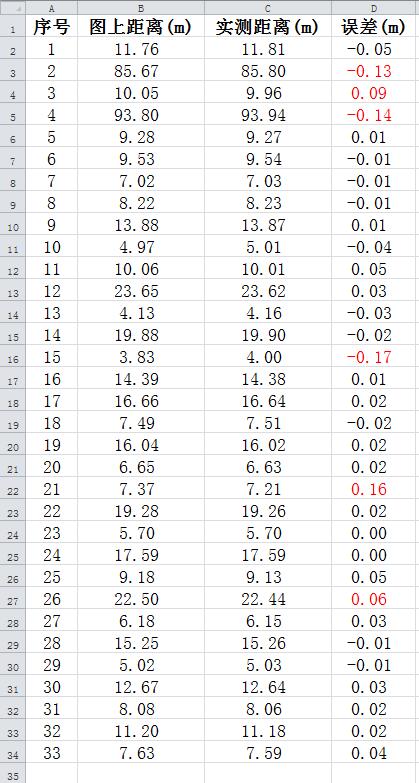
S205道路东侧测区测图成果自检精度对比表
S205道路东侧测区测图成果实测精度对比表