投稿单位:
河南省水利勘测有限公司
投稿人:贾智乐
2018年11月25日
摘要: 随着无人机技术的飞速发展,传统测量的单一化成果已经不能满足水利工程设计规划需求。本文基于飞马F200航测系统在大型拟建水库—信阳袁湾水库中的应用,探索并验证了一种高精度航测成图的方法,并在此基础上,融合基于BIM技术的单体化模型,实现了大型水利工程项目在可研阶段基于三维场景的应用和分析研究。
关键词:F200航测系统;高精度成图;多元化测绘产品; BIM
1 引言
无人机技术是近些年测绘行业的热门,其超低空飞行、受天气影响小、数据获取便捷、数据生产成本低等优点,使得无人机摄影测量在国土、农林业、电力、交通、水利、应急等行业得到了广泛的应用。但是受其自身重量轻以及其他因素的影响,无人机航测的精度并非是稳定的系统误差,对于数据处理的技术也有很高的要求,另外对于无人机正摄影像成果,常规应用主要是生产DLG、DOM、DEM、DSM等产品,虽然大大丰富了传统的测量成果,但仍有挖掘的空间。本文以拟建大型水库—信阳袁湾水库为研究对象,利用飞马F200航测系统,实现了在稀少像控点情况下库区1比1000地形图、DOM影像及DEM数据的生产,并通过UAV Manager 3.0版软件利用正摄影像构建了库区真实三维场景,在此基础上,制作库区设计坝体BIM模型,通过与三维场景的融合,实现了大型水利工程BIM模型的构建,通过一次航飞,实现了的多元化产品生产,对于后期的淹没分析以及项目评审,提供了更加直观的可视效果。
2 项目区概况及数据获取平台
拟建的袁湾水库位于信阳光山县南部,新县县城以北,潢河干流上,是以防洪为主,结合供水、灌溉,兼顾发电、改善生态等综合利用的大(2)型水利枢纽工程,根据设计淹没范围计算库区面积为30.5平方公里,且为不规则形状,库区为潜山区,最大落差约150米。项目采用飞马F200无人机进行正摄影像的获取,F200无人机翼展1.9米,单架次最大航时80分钟,携带35mm焦距的索尼RX1RM2全画幅相机。


图1 测区范围 图2 数据获取平台
3基于F200航测系统的多元化产品生产
水利行业与其他行业的最大区别是对高程精度的要求极高,由于水往高处流的自然属性,使得高程精度对于水利工程成败起着至关重要的影响,水利工程库容、挖填土方量计算的依据也是高程模型,而高程精度恰恰是航测的痛点和难点,因此如何提高航测数据的精度显得尤为突出。项目充分利用F200后差分技术,在实施过程中,通过稀少控制与大量外业检核点相结合,利用UAV Manager 3.0版软件进行空三解算,并在立体测图模式下严格的验证了空三成果的精度;在此基础上,生产了库区的真实场景三维模型,通过多平台、多技术的融合,构建了水利工程BIM模型,实现了水利工程项目多元化产品的生产。
3.1 控制测量及外业航飞影像获取
根据测区的形状以及成图比例尺要求,构建了东西方向的航测,其中航向重叠为80%,旁向重叠为60%,影像分辨率为7厘米。测区采用均匀布控,为增加航带间的稳固性,像控点主要布设于旁向重叠区,测区共布设像控点31个,检核点40个。飞行完成后,对照片的质量做初步的检查。
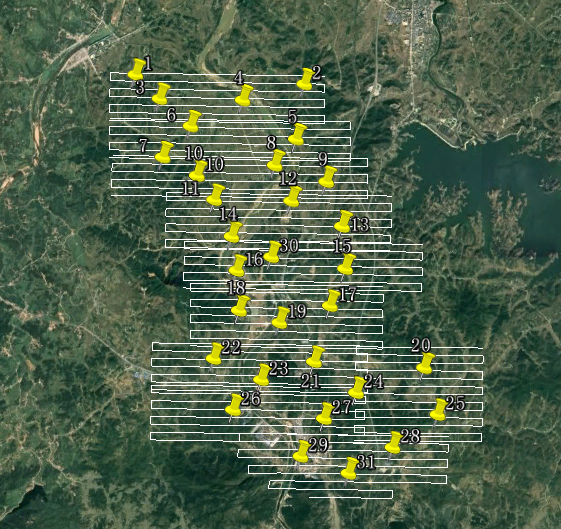

图3 航线及像控规划 图4 像控测量
3.2 空三处理及4D产品生产
无人机携带的相机多为非量测型相机,畸变比较严重,如果未能很好的消除掉相片畸变,对于整个空三成果影响巨大,甚至在立体测图时出现波浪状以及像对间接边差非常大,难以控制精度。本项目中,首先采用了飞马机器人团队针对相机模型构建的逐格网畸变的方法对原始相片进行畸变校正,传统的畸变参数主要是K1-K4,P1,P2,A,B等,为了更好的拟合索尼RX1RM2相机的畸变信息,在此基础上加入了K5,K6参数,通过特殊的检校场及检校算法,采用畸变拟合的方式计算出相机的参数。根据机载GPS数据与地面站GPS数据的联合解算,得到了高精度的照片曝光瞬间中心点经纬度坐标,根据项目的布尔莎七参数模型,将这些经纬度坐标及椭球高转换为项目要求的西安80坐标系和85高程,如图5所示,在未加入控制点进行优化的情况下,预测点的精度已经达到了两三个像元(绿色为预测位置,蓝色为刺点位置),这是在保证精度的情况的下,能够实现稀少控制的主要原因。完成以上操作后,在UAV Manager智拼图模块下,进行特征提取与匹配、空三计算,完成后刺控制点并空三优化,空三精度检查无误后,直接进行DOM、DEM、DSM的生成。导出立体测图工程,在立体测图模式下,首先对检核点精度进程检查,精度满足项目要求,方可开始立体测图作业,实现DLG的生产。由于空三匹配中连接点之间的迭代性,在大量的生产经验中证明,空三报告的精度并不难代表成图的精度,因此在大型生产项目中,一定要先在立体测图模式下检核检查点精度,精度满足测图需要后,方可进行全面的DLG生产作业。
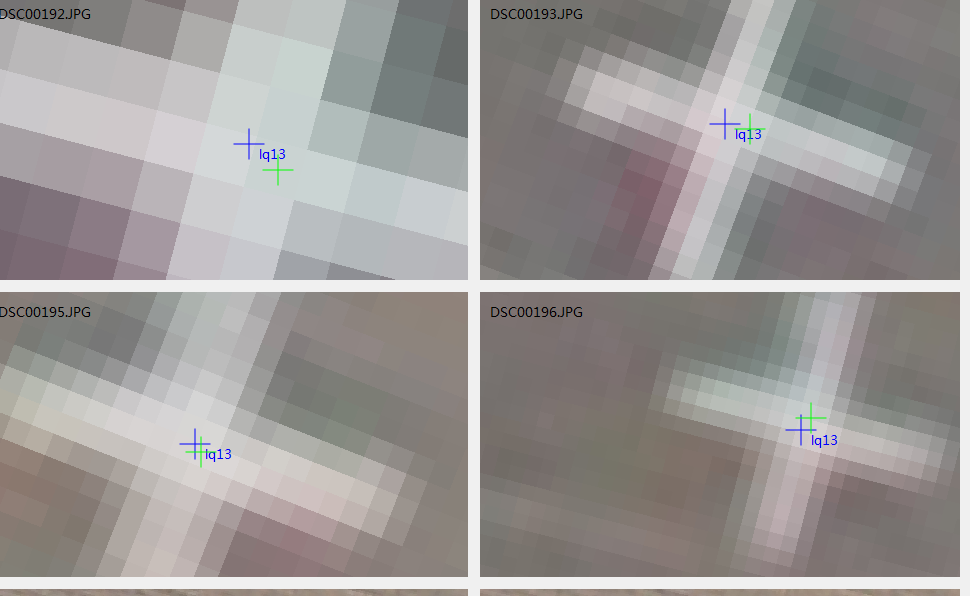
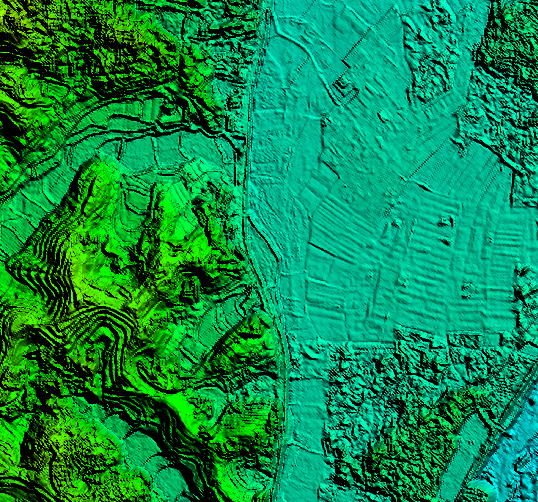
图5 预定点与实测点 图6 局部DEM细节

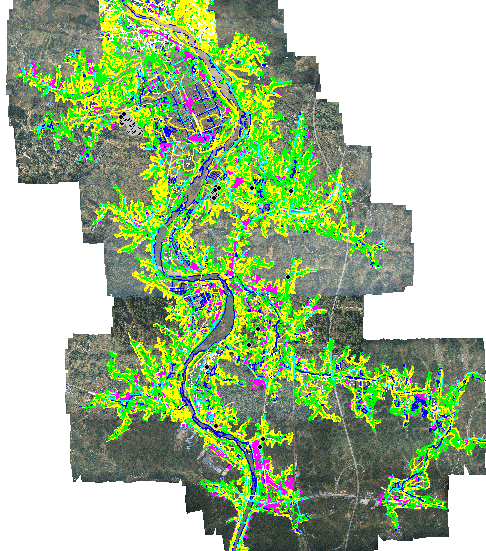
图7 测区DOM成果 图8 DOM叠加DLG成果
通过立体模型进行检核点精度检查,以及外业补图和查图的精度检验,使用F200航测系统实现了在稀少控制下的高精度测图,检核点中误差为0.18米,达到了水利工程1比1000地形图的精度要求,极大的减少了人为外业工作量,提高了生产效率,降低了生产成本。
3.3 基于正摄影像以及BIM技术的三维场景构建
航测的4D成果虽然极大的丰富了测绘的成果,但不是人们对这项技术追求的终点,在多年的水利行业实践中发现,对于大型的水利项目,三维场景所展现的直观性更能反应出水利工程的真实情况,因此倍受人们的青睐。通过无人机携带多镜头相机进行倾斜摄影测量的方式可以获取测区精准的三维模型,但是效率低、成本高、生产周期长,基于倾斜三维模型进行测图,也有诸多的不便。对于水利三维场景的构建,居民地等建筑设施反而不是人们关注的重点,UAV Manager 3.0版软件开发了基于正摄影像构建的三维模型,虽然建筑物的侧面纹理无法比拟多镜头倾斜摄影测量,但能较好的反应出工程区的三维场景,如图9所示,山体的侧面纹理比较理想。因此,通过第三方软件构建重点关注区如大坝、泵站、溢洪道、建管处等BIM模型,叠加于库区的三维场景中,即可实现水利工程施工完成后的真实三维场景构建,相比于倾斜摄影测量的方式构建三维场景,大大减少了成本和时间,这对于项目在可研阶段分析库区淹没范围、展示大坝真实形态、专家评审等等方面有这巨大的优势。
图9 基于正摄影像构建的三维场景
在袁湾水库的项目中,充分利用了F200航测系统软硬件的优势,在完了4D产品的生产后,构建了库区OSGB格式的三维现状场景。根据设计方面提供的大坝位置、尺寸、样式等信息,基于3D MAX软件构建了真实的大坝BIM模型,输出OSGB格式,如图10所示;根据淹没区面积在软件材料库中制作静态水面,依据平面位置叠加到库区OSGB格式的三维模型中,通过Context Capture生成S3C索引,实现多模型的叠加。在项目的可研阶段,即可真实的展示出大坝完工后在三维场景中的形态,以及库区在设计淹没高程内的淹没区域(如图11所示),为业主单位提供了真实数据和直观的效果,在项目的评审阶段,可以使评审专家从多角度、多方位、多比例了解库区的基本情况和大坝信息。


图10 大坝BIM模型 图11 三维场景淹没区域
4总结
多元化的航测产品正在改变着人们对测量成果的认知,BIM技术的快速发展已成为水利行业发展的方向。本文通过理论与实践相结合,探索了一种基于飞马F200航测系统高精度成图的方法,在大型的水利工程中得到了验证;并以正摄影像为基础,构建了库区三维场景,结合单体化BIM模型实现了大型水利工程多时空三维场景的构建,为在其他水利工程项目中的应用提供了一定的借鉴。
参考文献:
[1] 朱万雄.无人机数据处理关键技术运用[J].地理空间信息,2013,11( 6) : 34-35.
[2] 李隆方,张著豪,邓晓丽.基于无人机影像的三维模型构建技术[J].测绘工程, 2013,22( 4) : 85-89.
[3]杨国东,王民水.倾斜摄影测量技术应用及展望[J].测绘与空间地理信息,2016,39(1):13-15+18.
[4]杨慧琴.无人机航测技术在基层测绘工作中的应用分析[J].北京测绘,2015,6:138-140.
[5]祝连波,田云峰.我国建筑业BIM 研究文献综述[J].建筑设计管理,2014(2):33-37.
[6]赵盈盈,涂中强.BIM 技术在建筑类课程项目化教学中的应用 基于 建筑工程施工图识读 课程[J].科技创新与生产力, 2016 (08): 66-68.
[7]王建强,钟春惺,江丽钧,等.基于多视航空影像的城市三维建模方法[J].测绘科学,2014,39(3):70-74.
