投稿单位:
黄委会黄河设计院
投稿人:何永立
2018年6月20日
项目概况
项目来源
为加快水利信息化建设步伐,2018年5月,黄河水利委员会委托我公司承担黄委重点水利工程三维实景模型建设项目。摄影区域分别是:故县水利枢纽及周边设施、陆浑水利枢纽及周边设施、石洼分洪闸、十里堡分洪闸、陈山口泄洪闸和清河门(退水)闸及周边设施。由航测摄影中心负责无人机倾斜摄影、空三加密、DSM生产、三维模型构建、模型修饰等。最终向黄委提交原始摄影数据、精修后的三维模型等产品。
测区概况
故县水利枢纽,位于河南省洛宁县故县镇、黄河支流洛河中游,距洛阳市165km。工程以防洪为主,兼有灌溉、发电和工业供水等综合效益。水库建筑物由拦河坝、电站厂房及附设坝体内的泄水孔道所组成。1958年首次开工,于1978年再次复工,1980年截流,1994年水库投入运用。拦河坝为混凝土实体重力坝,最大坝高125米,总库容11.75亿立方米,坝顶高程553米(大沽高程系),坝顶宽9米,坝顶长315米,由挡水坝段、电站坝段、底孔坝段、溢流坝段及中孔坝段组成,共21个坝段,坝段一般长16.5米,最大19米,最小13米。成图区域最低点海拔455米,最高点海拔573米,而且大坝两侧山头最高点附近有高出地面约40米的高压线塔,高压线横跨在大坝侧上方,航空摄影作业难度特别大。成图区域如图1所示:
图1故县水利枢纽成图区域
陆浑水利枢纽,位于黄河二级支流伊河上,距洛阳市67公里,控制流域面积3492平方公里,占伊河流域面积57.9%。坝址处多年平均年径流量是10.25亿立方米(1951~1968年),多年平均流量32.5立方米每秒,多年平均年输沙量约300万吨,平均含沙量3.2公斤每立方米,泥沙90%以上都集中在汛期7~10月,非汛期河水清澈见底。千年一遇洪峰流量12400立方米每秒,万年一遇洪峰流量17100立方米每秒,保坝洪水(万年一遇洪峰加20%)洪峰流量20520立方米每秒。成图区域如图2所示:
图2陆浑水利枢纽成图区域
东平湖位于东平县,湖区总面积632平方公里。20世纪50年代后在原东平湖的基础上,为分蓄黄河特大洪水围湖筑堤,它是黄河下游的重要分洪工程。东平湖为宋代梁山泊演变而来,由于黄河多次决口南徙,梁山泊逐渐淤积萎缩,为居民逐步垦殖。大汶河原经山东大清河流入渤海。1855年黄河改道夺大清河入渤海,大汶河(下游仍称大清河)遂入黄河。黄河河床逐年淤高,大清河入黄河口淤塞,以致积水成湖,形成黄河的自然滞洪区,民国年间始称东平湖。1958年,在位山修建拦河闸坝、进湖闸、出湖闸,并加高加固围堤成为东平湖水库。由于黄河河道淤积及湖周浸没等问题,于1962年改为滞洪工程。1963年改造为无坝分洪工程。
东平湖有有分洪闸3座(新湖1座、老湖2座),总设计分洪流量8500m3/s,建于河湖两用堤上,侧向分洪。分别是石洼分洪闸、林辛分洪闸、十里堡分洪闸。建有泄洪闸3座,总设计流量3500m3/s,分别是陈山口泄洪闸、清河门(退水)闸、司垓泄水闸。本次摄影区域主要是石洼分洪闸、十里堡分洪闸、陈山口与清河门(退水)闸联合区域。
石洼分洪闸,向新湖分洪,设计分洪流量5000m3/s,49孔,每孔净宽6m,高4m,开敞式宽顶堰闸,钢筋混凝土平板直升闸门,固定式启闭机,混凝土灌注桩基。1967年3月~1969年6月始建,1976年10月~1979年6月改建。成图区域如图3所示:

图3石洼分洪闸成图区域
十里堡分洪闸,向老湖分洪,设计分洪流量2000m3/s,10孔,每孔净宽9.7m,高4m。混凝土灌注桩基,开敞式结构,平板钢闸门,1960年建成,1979年~1981年改建,于1960年、1982年先后两次运用,最大分洪流量为1340m3/s。成图区域如图4所示:

图4十里堡分洪闸成图区域
陈山口泄洪闸,为老湖向黄河退水之用,设计泄水流量1200m3/s,7孔,闸孔净宽10m,高5.5m,钢平板闸门,1960年建成,1998年改建。清河门(退水)闸,设计泄洪流量1300m3/s,15孔,每孔净宽6m,高5.5m,混凝土灌注桩基,开敞式混凝土平板直升闸门。1968年建戒,1997年改建。该闸与陈山口闸联合运用,但因黄河河道淤积,泄水日益困难。成图区域如图5所示:
图5陈山口泄洪闸和清河门(退水)闸联合成图区域
生产组织
考虑到作业区域实际情况,本项目采用搭载SONY QX1倾斜相机(镜头角度为左38°左倾,右25°后倾)的飞马F200智能航测系统和飞马D1000智能航测系统进行无人机航飞摄影作业。内业选择4台高档计算机,联机组成工作站, 对所采集影像数据进行空三加密、三维模型构建、模型修饰等,
航测摄影中心接到任务后,第一时间对测区概况和任务要求进行了初步了解,选取适当作业仪器设备,组织作业小组,并根据技术设计要求进行航线预设,并在Google Earth上预选起降场地。在完成前期准备工作后,航测摄影中心机组人员于2018年5月8日由郑州出发,5月11日完成陆浑和故县水利枢纽区域航摄外业。在返回郑州后立即进行资料和数据整理,完成后交由内业进行空三加密、三维建模作业。在及时跟踪天气的前提下,航测摄影中心机组人员于2018年5月15日再次由郑州出发,5月20日完成山东石洼分洪闸、十里堡分洪闸、陈山口与清河门(退水)闸联合区域航摄外业。主要工作内容是起降点查勘、无人机低空航空摄影、像控点选测。起降场地查勘6个,航摄飞行作业32个架次,其中陆浑水库使用F200型飞行2个架次,其余30个架次均采用D1000型无人机进行作业。
主要开展以下内容作业,如表1所示:
表1 主要作业内容
| 序号 | 工作内容 | 完成工作量个数/片数 | 备注 |
| 1 | 起降点查勘 | 6个 | |
| 2 | 故县水利枢纽 | 224张 | D1000 |
| 3 | 陆浑水利枢纽 | 3136张 | F200 |
| 1229张 | D1000 | ||
| 4 | 石洼分洪闸 | 3505张 | D1000 |
| 5 | 十里堡分洪闸 | 1629张 | D1000 |
| 6 | 陈山口与清河门(退水)闸联合 | 4439张 | D1000 |
资源配置
人员配置
航测摄影中心共组织工程师1人,助理工程师2人,分别任操控手、机务、安全员职位。
设备配置
考虑到作业区域实际情况,本项目采用搭载SONY QX1倾斜相机(镜头角度为左38°左倾,右25°后倾)的飞马F200智能航测系统和飞马D1000智能航测系统进行无人机航飞摄影作业。
(1)F200型无人机系统,如图6所示。

图6 飞马F200航测摄影系统
其航空摄影系统核心参数如下:
材质:EPO+碳纤复合材料
翼展:1.9m
机长:1.07m
标准起飞重量:3.75kg(航测系统)
巡航速度:60km/h
最大续航时间:1.5h
最大可手抛起飞海拔高度:3500m
升限:5000m(海拔高度)
测控半径:10km
起降方式:手抛起飞/自动滑降、伞降
载荷:可多载荷互换,包括索尼RX1RM2和双相机系统
分辨率:2cm @ 150m
飞行高度:150m-1500m
信号跟踪:GPS:L1/L2;BD:B1、B2;GLONASS:L1,L2,20Hz
定位精度:5cm;
相机类型:SONY ILCE-QX1双相机系统;
有效像素:2400万;
镜头参数:35mm定焦。
(2)D1000 型无人机系统,如图7所示。

图7 飞马F200航测摄影系统
起飞重量:1388g
轴距:350mm
最大承受风速:10m/s
最大飞行时间:30min
电子快门速度:8 – 1/8000 s
影像传感器:1英寸CMOS 有效像素2000万
镜头:FOV 84° 8.8 mm/24 mm(35 mm格式等效)
ISO 范围:视频:100 – 3200(自动)100 – 6400(手动)
照片:100 – 3200(自动)100 – 12800(手动)
照片分辨率:4864×3648
支持文件系统:FAT32(≤ 32 GB)、exFAT(> 32 GB)。
另外,本项目配备GNSS接收机1台,笔记本电脑2台,台式计算机4台,汽车1辆。
已有资料利用情况
- 我单位完成的故县D级GPS成果DGX**、DGX**、DGX**、DGX**可作为故县水利枢纽区域作业平面、高程起算数据。
- 我单位收集的洛阳市嵩县E级GPS控制点成果EC**、EC**、EC**、EC**,可作为陆浑水利枢纽区域作业平面、高程起算数据。
- 我单位完成的2017年度直管河道和水利工程划界D级GPS控制点成果DDP**、DDP**、DLS**、DLS**, 可作为石洼分洪闸、十里堡分洪闸、陈山口与清河门(退水)闸联合区域作业平面、高程起算数据。
- 由黄河水利委员会提供的故县水利枢纽及周边设施、陆浑水利枢纽及周边设施、石洼分洪闸、十里堡分洪闸、陈山口泄洪闸和清河门(退水)闸及周边设施区域成图范围,可供航线设计和起降场地选取参考使用。
作业依据
(1)《无人机航摄安全作业基本要求》(CH/Z3001-2010);
(2)《无人机航摄系统技术要求》(CH/Z3002-2010);
(3)《低空数字航空摄影测量外业规范》(CH/Z3004-2010);
(4)《低空数字航空摄影测量内业规范》(CH/Z3003-2010);
(5)《低空数字航空摄影测量规范》(CH/Z3005-2010);
(6)《数字航空摄影测量控制测量规范》(CH/T3006-2011);
(7)《测绘作业人员安全规范》(CH 1016-2008);
(8)《城市三维建模技术规范》(CJJ/T 157-2010);
(9)《三维地理信息模型数据产品规范》(CH/T 9015-2012);
(10)《三维地理信息模型生产规范》(CH/T 9016-2012);
(11)《三维地理信息模型数据产品质量检查与验收》(CH/T 9024-2014);
(12)《水利水电工程测量规范》(SL197-2013);
(13)《测绘成果质量检查与验收》(GB/T 24356-2009);
(14)本项目技术设计书。
测绘基准
- 平面坐标系统:采用WGS-84坐标系,坐标原点为地球质心,其地心空间直角坐标系的Z轴指向BIH (国际时间服务机构)1984.O定义的协议地球极(CTP)方向,X轴指向BIH 1984.0的零子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系统。
- 高程基准:1985国家高程基准。
航空摄影有关技术参数
航空摄影:故县水利枢纽测区内(海拔落差较大)地面分辨率优于0.07m,其他测区内地面分辨率优于0.05m。
空三加密:基本定向点平面位置残差不大于0.3m,高程残差不大于0.26m。检查点平面位置误差均不大于0.5m,高程误差不大于0.4m。(阴影、摄影死角、隐蔽等特殊困难地块误差可适当放宽0.5倍)。
三维模型:平面精度、高程精度均达到Ⅲ级,平面中误差不大于0.8m,高度中误差不大于1m。地形(DEM)格网点平地高程中误差不大于0.37m。(阴影、摄影死角、隐蔽等特殊困难地块误差可适当放宽0.5倍)。
飞行质量
(1)像片重叠度:
(a)航向重叠度要求控制在60%~80%之间;
(b)旁向重叠度要求控制在60%~80%之间。
(2)像片倾角:
像片倾角一般不大于5°,最大不超过12°,出现8°的片数不多于总数的10%。特别困难地区一般不大于8°,最大不超过15°,出现超过10°的片数不多于总数的10%。
(3)像片旋角
像片旋角一般不大于15°,在确保像片航向和旁向重叠度满足要求的前提下,个别最大旋角不超过30°。在同一航线上旋角超过20°像片数不应超过3片,超过15°旋角的像片数不得超过分区像片总数的10%。
(4)摄区边界覆盖保证
航向覆盖超出摄区边界线应不少于两条基线,旁向覆盖超出摄区边界线一般不应少于像幅的50%;在便于施测像片控制点及不影响内业正常加密时,旁向覆盖超出摄区边界线应不少于像幅的30%。
(5)航高保持
统一航线上相邻像片的航高差不应大于30m,最大航高与最小航高之差不应大于50m,实际航高与设计航高之差不应大于50m。
(6)漏洞补摄
航摄中出现的相对漏洞和绝对漏洞均应及时补摄,应采用前一次飞行的数码相机补摄,补摄航线的两端应超出漏洞之外两条基线。
影像质量
影像质量要求如下:
(a)影像要求色彩均匀清晰,层次丰富,反差适中,色调柔和;能辨认出与地面分辨率相适应的细小地物影像。
(b)影像上不应有云、云影、烟、大面积反光、污点等缺陷。
(c)确保因飞机地速的影响,在曝光瞬间造成的像片位移一般不应大于1个像素,最大不应大于1.5个像素。
(c)拼接影像无明显模糊、重影和错位现象。
作业流程与方法
采用无人机航空摄影的方法获取影像资料,根据测区范围预设计无人机航空摄影航线,实地踏勘测区,选取满足起降条件的飞行起降场地,根据场地情况对航线进行修改、优化,并设计像控点布设方案,选择符合无人机低空航空摄影的天气进行航摄作业。航摄作业分区块完成后,随即将飞行影像数据交付内业,待像控成果出来后,由内业人员完成相应区块的空三加密、三维模型生产等工作。
起降场地查勘
进入测区前,使用谷歌地图对可能符合起降要求的地点进行标注,并记录坐标。到达测区后,优先对预选地点进行查勘,同时对未标注但符合起降要求的场地进行查勘。选取的起降场地,视野开阔,没有明显遮挡物和干扰源。
航线设计
根据设计书要求的地面分辨率、测区最低点和最高点高程、重叠度要求,根据三维建模对地物各个立面都要获取足够重叠度的影像要求,飞马F200系统设计飞往返航线,飞马D1000系统设计飞“井”字和“S”型航线。
航线设计方法:
1.使用谷歌地图对每个分区进行最高、最低点分析。确定测区最低、最高点的高程。
2.根据航摄范围线画出相应的航飞区块,再选择相应的摄影设备和航飞参数,生成飞行航线。
3.对每个架次及架次间进行优化设计,尽量减少航程,保证飞行重叠度。
4.生成航线后与Google earth提供的高程数据对比,以保证飞机飞行安全,无撞机风险。
本项目共设计飞行32个架次(F200型2个,D1000型30个),各区块航线设计如下图所示:
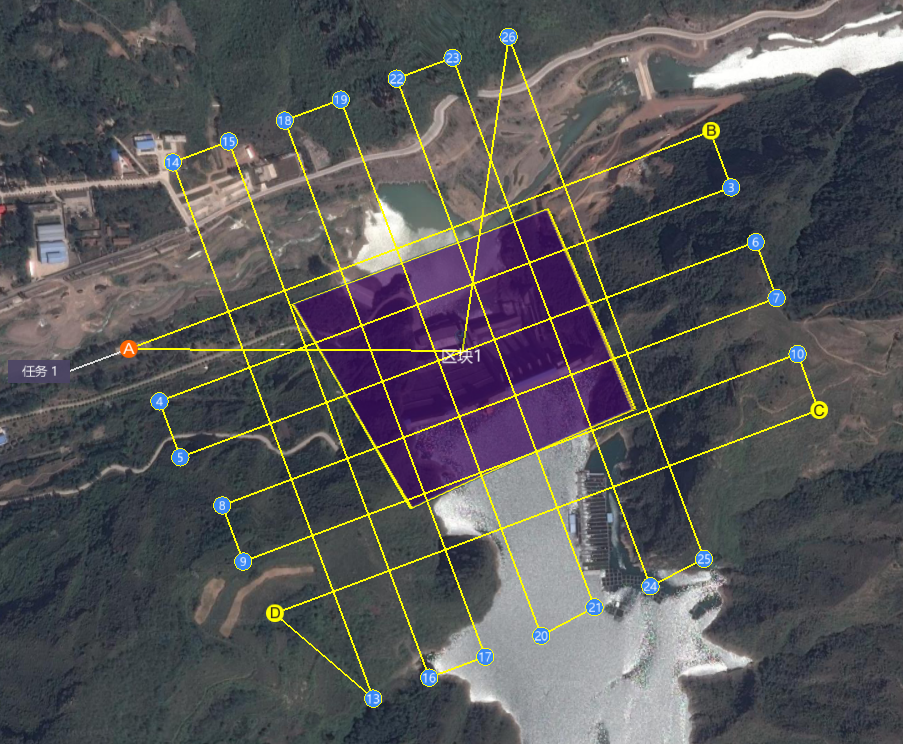
图8 故县水利枢纽倾斜航线(左)正射航线(右)
图9 陆浑水利枢纽倾斜往返航线(飞马F200)


图10 陆浑水利枢纽倾斜航线(左)正射航线(右)(飞马D1000)
图11 石洼分洪闸倾斜航线(左)正射航线(右)
图12 十里堡分洪闸倾斜航线(左)正射航线(右)
图13 陈山口泄洪闸和清河门(退水)闸联合区域倾斜航线(左)正射航线(右)
航空摄影作业
在天气符合飞行作业要求的情况下,机组人员携带设备到达起降场。首先对航摄硬件进行检查维护,确保其能在最佳状态下工作。在飞机起飞前对飞机状况进行全面检查,确保安全后方可起飞作业。飞机起飞成功,作业过程中应时刻监控飞机状况参数。飞机起飞前后的作业流程,如表2所示。
表2 飞行前后操作流程表
| 起飞前后操作流程 | ||
| 起飞 | 1 | 做好飞前准备工作 |
| 2 | 打开智航线,双击作业区块,检查已规划的航线参数 | |
| 3 | 组装飞机,安全扣,机翼,机身,左右尾翼,碳管,左右机翼,降落伞,设置安装相机,飞机电池 | |
| 4 | 起降点和起降方式的选择(获取起降点,手抛起飞,伞降) | |
| 5 | 检查俯仰滚转、安全插销、空速管罩 | |
| 6 | 手抛起飞 | |
| 自驾模式 | 7 | 监控飞机姿态、位置、高度、空速、剩余电量等参数 |
| 降落 | 8 | 下载机载POS、照片,数据整理,设备回收 |
像控测量
像片控制点的布设
像控点全部为平高点,布设采用区域网布点方案,航线两端应布设像控点,且测区四角均应布设像控点。
像片控制点的选取与测量
像控点应选取在能够准确判定位置的明显地无处,尽量不选取地角、草棵等不易准确定位的地方。鉴于目前使用的软件在空三加密区域网平差计算上已具备先进完善的功能,区域网大小根据航飞情况、地形情况、计算机运算能力等进行综合划分,区域网之间的像片控制点应尽量选择在上、下航线重叠的中间,相邻区域网尽量共用像控点。
像片控制测量采用双频GNSS接收机,基于GNSS CORS网络RTK技术施测,作业前必须在已知控制点上进行检校,作业时取三次读数的平均值为最终成果。
内业软硬件环境及工作流程
内业软硬件环境
内业选择四台高性能计算机,联机组成工作站,软件采用ContextCapture Center,对所采集影像数据进行空三加密、三维模型构建、模型修饰等,作业技术流程如下:
资料收集
方案审批
方案制定
航空摄影
过程检查
像控测量
空三加密
三维建模
模型修饰
质量检查
成果提交
图13 内业作业技术流程图
空三加密
将相机参数、影像数据、POS数据进行多视角影像特征点密集匹配,并以此进行区域网的自由网多视影像联合约束平差解算,建立在空间尺度可以适度自由变形的立体模型,完成相对定向;将外业测定的像片控制点成果,在内业环境中进行转刺,利用这些点对已有区域网模型进行约束平差结算,将区域网纳入到精确的大地坐标系统中,完成绝对定向。空三结束后及时查看精度报告以符合规范要求。
三维建模
全自动三维建模采用多机多节点并行运算的ContextCapture Center软件进行,建模流程如图14,将空三后的成果数据直接提交生成三维TIN格网构建、白体三维模型创建、自助纹理映射和三维场景构建。
原始影像
三维TIN格网构建
区域网平差
多视角影像密集匹配
相机文件
三维场景
自助纹理映射
白体三维模型创建
POS文件
图14 ContextCapture Center空三建模流程
模型修饰
模型修饰主要是对水域或模型漏洞进行修补,对漂浮物进行删除,局部进行影像纹理映射等等,采用CC软件和补飞数据进行约束干预后重新生成模型,使模型不存在漏洞。生产的模型应满足以下要求:
- 建筑物三维立体块模型应该完整,位置准确,具有现实性,应与获取的航空影像表现一直;
- 建筑物三维模型应精确反应地物外轮廓基本特征;
- 建筑物模型的高度与平面尺寸应于实际保持一致的比例。
本项目所生产模型较多,数据量较大,成果均以*.obj格式提交,现以故县水利枢纽为例,生产的模型正视截图如下:
图15 故县水利枢纽三维模型截图
质量保证措施
航摄资料质量包括飞行质量和摄影质量两个方面。航摄飞行前认真检查无人机航摄系统软硬件都处于最佳状态,航摄飞行操作严格按照程序作业,航摄飞行过程中时刻监控飞行状态,确保飞行安全和质量。飞机降落后,及时将影像数据拷至电脑,查看影像质量。
(1)飞行质量控制措施:
导航:采用GPS/IMU组合导航,检查GPS导航仪、主(副)磁罗盘系统及惯导系统的工作状况,防止出现过大航向偏差和因卫星失锁造成GPS导航失效。
(2)摄影质量控制措施:
利用飞行管理系统软件控制飞行,保证飞行数据准确。
摄影天气控制:严格掌握摄影天气。原则上航摄必须在晴天碧空,能见度良好时进行。本摄区可在云下进行,但必须保证地面无云影,并有足够的光照度。
曝光参数的选用:根据飞行高度、大气能见度、太阳高度角等情况正确选择合理的曝光参数,保证影像质量。
航摄结束飞机返场后,摄影员要采用飞行管理软件,立即对获取的摄站点GPS坐标数据作技术处理,当天评价飞行质量,航摄中出现的相对漏洞和绝对漏洞均应及时补摄,应采用前一次航摄飞行的数码相机补摄。
(5)在整个作业实施过程中,实行“两级检查制度”,保证飞行和影像质量满足航摄规范的要求。两级检查是指:现场航摄作业人员在第一时间对航摄成果进行检查;航测摄影中心在整个过程中进行监督,整个摄区航摄飞行完成后,及时安排人员对成果陆续进行检查,确定没有缺陷和需要补摄的内容后,对整个摄区的资料按照规范的要求进行整理。
安全生产和风险规避
航空摄影是一项高风险的工作,在项目的实施过程中要积极做好安全教育和安全检查,确保安全生产并保证项目按期实施完成。
(1)保证人员安全
现场作业人员要与当地居民友好相处,尊重当地风俗,避免冲突。作业人员住宿应选择安全之处,饮食应注意卫生。到达测区后,应及时了解当地医疗机构地址,以备不时之需。
(2)保证设备安全
全方位维护设备,使设备处于良好状态。在地形复杂地区飞行前应选取合适的起降场地,以确保飞机的起飞和降落安全,起飞前应按规程检查各项指标,坚持不带病作业;飞行过程中密切监视飞行状态指标,降落后及时维护。
(3)保证成果安全
摄影成果采用保密硬盘储存,保证不泄密。
上交成果清单
- 无人机航摄原始影像数据(*.JPG);
- 像控数据(*.txt)
(3)三维模型成果数据(*.obj/*.osgb);
(4)技术设计书、技术总结报告等纸质及电子版文件。
解决的生产问题、创新型应用及优势详见附件(论文)
图15 论文获奖证书
工作照片

图16 F200起飞照片

图17 D1000起飞照片
