投稿单位:
西南大学地理科学学院
四川省农业科学院遥感应用研究所
投稿人:
林家元 王枚梅
2018年11月26日
摘要:树冠是树木获取光能并进行能量转换的主要场所,在监测树木长势,估算树木生物量等方面具有重要的作用。及时准确获取树冠参数信息有助于研究树木生长状况和森林变化动态,有效改善森林经营管理。无人机遥感具有快速机动、云下飞行、影像分辨率高、成本低等优势,为获取树冠参数信息与监测树冠变化提供了有效的途径。论文以贡嘎山雅家梗局部范围亚高山针叶林区为研究区,采用飞马F1000固定翼无人机获取可见光遥感影像,基于面向对象方法自动提取了东西冠幅、南北冠幅、单元面积树木数和郁闭度等参数。以目视解译结果作为参考数据进行验证,东西冠幅和南北冠幅的提取精度分别是0.7651和0.8556,单元面积树木数和郁闭度的提取精度分别是0.99和0.92。结果表明基于无人机遥感影像的树冠参数信息自动提取方法高效可靠,能够用于大面积亚高山针叶林的遥感调查和监测。
关键词:无人机遥感,亚高山针叶林,树冠参数,面向对象
1 概述
树冠是树木光合作用的主要场所,是树木乃至森林的重要组成部分。准确获取树冠信息有助于监测树木长势、估算树木生物量及小班蓄积量、预防树木病虫害[1],在森林经营管理中越来越受到重视。位于我国青藏高原东南缘的川西亚高山针叶林,既是长江上游重要的生态屏障,也是许多高寒生物物种的分化和变异中心,在涵养水源、调节区域气候和维持生物多样性等方面有着不可替代的作用[2]。但川西亚高山针叶林区往往海拔较高,交通不便,传统方法难以用于研究该区树冠。且传统调查工作量大、成本高、周期长、效率低,不能及时反映森林情况,满足不了现代林业发展的需求。随着计算机和对地观测技术的发展,现代遥感与摄影测量技术的应用将会把亚高山针叶林研究的尺度和精度提升到一个新的高度。
无人机是近年迅速发展起来的对地观测技术。配备不同传感器的无人机,可由无线电遥控设备进行手摇操纵飞行,或在计算机预编程序控制下自主飞行[3]。利用无人机可快速拍摄航空影像,获取所需空间遥感数据,并实时处理、建模和分析[4]。传统方法往往受限于调查成本和效率,卫星遥感受限于低空间分辨率、云影、低时效性,均不能满足亚高山针叶林树冠信息快速准确提取的要求。无人机遥感具有高空间分辨率、可云下飞行、快速灵活、低成本等优点,为快速获取亚高山针叶林影像及处理影像获取信息提供了有效途径。
目前已有基于无人机高分影像对森林树冠信息提取的研究。樊仲谋等获取试验区无人机影像后,提取出单木树冠并获取树冠的直径和面积大小,测量精度达到82.2%[5]。吕晓君等通过无人机对病虫害危害的松林进行航拍,生成数字正射影像图。利用松树树冠颜色改变,统计出作业区域内变色树木数量[6]。国外Hernández等基于研究区无人机影像,采用混合像元和基于区域的算法自动提取单木,估测出单木树高、冠幅等参数。以样地实测数据进行精度检验,结果表明样方内所有树木都被正确探测,参数提取精度也较高[7]。Panagiotidis等结合三维重建技术和GIS技术(地理信息系统),从无人机影像中提取树高、冠幅,取得了较好的效果[8]。
论文探讨高空间分辨率的无人机影像在亚高山针叶林树冠信息提取中的应用。以四川省贡嘎山雅家梗局部范围内的亚高山针叶林为研究对象,以高分辨率无人机影像为数据源,利用面向对象方法提取出树冠,结合空间分析整饰结果,并提取出单元面积树木数、林分郁闭度、东西向冠幅、南北向冠幅四个参数。以人工勾绘结果为参考进行精度验证,结果表明提取方法高效易行,精度可靠。
2 研究区概况及无人机系统
2.1 研究区概况
选择贡嘎山雅家梗为研究区,经度范围102.02°~102.03°E,纬度范围29.86°~29.88°N,研究区位置如图1所示。贡嘎山位于青藏高原东南缘,全区域年均温度东高西低、南高北低,降雨丰富。雅家梗位于贡嘎山东坡,处于我国东部亚热带湿润季风区与青藏高原寒冷气候的过渡带,海拔高程3000米~4000米,多年平均气温3.8℃,年平均降水量1940mm。气候和植被呈寒温带特征,土壤层较厚,以山地暗棕壤为主。雅家梗地区森林资源丰富,植被垂直分异明显,分布有大面积的以冷杉属(Abies Mill)、云杉属(Picea Dieter)为主的亚高山常绿针叶林和以高山栎(Quercus spinosa)为主的山地硬叶常绿阔叶林,在区域水土保持、生态系统稳定性维护方面起着重要作用[9,10]。
图1 贡嘎山雅家梗空间位置示意图
2.2 无人机系统及作业过程
所用飞马F1000无人机遥感系统由四部分组成:电动固定翼无人机飞行平台(图2 (a)),飞行控制系统(图2 (b)),微型单反相机(图2 (c))及地面控制系统(图2 (d))。无人机飞行平台翼展1.6m,机身长1.1m,起飞重量3.2kg。飞行控制系统主要控制和稳定无人机的起飞/着陆、飞行高度、航向和姿态。所配备经改装后的SONY ILCE-5100微单相机,尺寸为75×63×50mm,重192g(含镜头)。地面控制系统的主要功能有航迹规划与上传、飞行姿态数据下载、遥控指令发送等。固定翼无人机具有续航时间长、飞行速度快、飞行效率高、稳定安全等优势,适合高海拔复杂山地环境的航拍作业。
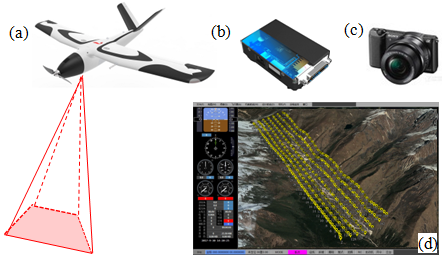
图2 飞马F1000电动固定翼无人机遥感系统
航摄在2016年5月24日进行,试验当天晴天,风速较小,适合无人机航拍作业(图3)。规划飞行航线时,设置航向重叠率为80%,旁向重叠率为60%,保证后期数据处理精度。将预设航线导入飞行控制系统,以70km/h的速度飞行90分钟,拍摄高度约1000m。获取JPEG格式的真彩色影像451张,空间分辨率为0.15m,有红、绿、蓝3个波段,2400万像素(6000×4000)。

图3 现场组装和航拍作业照片
3 研究方法
3.1 影像处理
图4 研究区无人机正射影像
采用俄罗斯的无人机数据处理软件AgiSoft PhotoScan进行影像处理。它根据最新的多视图三维重建技术,基于影像自动生成高分辨率正射影像及带精细色彩纹理的数字高程模型 [11]。带有空间参考坐标的数据产品可直接测量,为研究者带来了极大的便利,目前已广泛应用于林业调查、考古等行业。主要处理流程为:检查无人机影像,筛选掉航线拐角处重叠度过大、姿态角过大、成像效果较差的影像;输入影像及姿态数据,自动空三,正射校正,图像拼接。完成处理后,裁剪影像获取研究区的高分辨率正射影像(图4)。
3.2 多尺度分割
采用面向对象的方法提取树冠,用美国Trimble公司的软件eCognition实现。无人机高分辨率影像有着丰富的空间结构信息和清晰的纹理细节信息,能准确表达对象的表面纹理、内部结构、形状面积和空间关系等。面向对象的方法综合影像对象的光谱、形状、纹理、邻域、层次、空间位置等特征信息,分割影像得到同质对象,再根据目标地物的实际要求进行提取,能够得到较高精度的信息提取结果[12,13]。在面向对象的遥感影像信息提取技术中,影像分割是关键技术之一,分割结果直接影响后续的分类及信息提取效果。分割时需要输入三个参数:分割尺度、形状因子、紧凑度因子。尺度(scale)参数即基于异质性最小的区域合并算法中的阈值,它直接决定了影像对象大小、分割的质量及信息提取的精度[14,15]。eCoginition采用多尺度分割方法,即在不同尺度上对影像进行分割,这样可避免采用同一尺度分割影像容易造成的“分割不足”或“分割过度”现象。其分割原则是:影像对象内部同质性最大、异质性最小[16]。依据经验并参考其他学者研宄,形状和紧凑度因子均设为0.5。
利用eCoginition软件的ESP (Estimation of Scale Parameter) 插件,结合具体的信息提取目标(这里是针叶林树冠),找到影像的最佳分割尺度。此次处理中候选最佳分割尺度有24、69、72、81、90、104。从图5可以看出,当分割尺度为24时,影像被分割得过于破碎(图5(a));分割尺度为69时,略破碎,没达到一次分割的目的(图5(b))。当分割尺度为72时,破碎对象几乎不存在,树冠轮廓清晰可见(图5(c))。当分割尺度由81到104时,对象逐渐被大规模合并,不是理想结果(图5(d)~(f))。因此确定本次分割的最佳分割尺度为72。
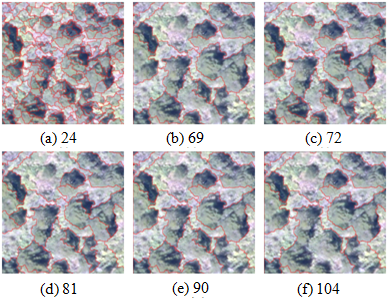
图5 不同分割尺度效果对比图
3.3 单木树冠提取
采用最邻近分类的方法提取单木树冠。最邻近分类是监督分类的一种,根据要求选择样本,确定合适的特征集,计算样本在所选特征之间的分离程度[18]。所选研究区为海拔3000米以上的亚高山针叶林分布区,没有人工建筑的干扰,因此将分类系统设为冠层和地面两类。然后构建特征空间,特征空间指参与分类的特征。面向对象分类时可直接使用波段参与,也可以利用标准差(standard deviation)、波段比率(ratio)、亮度(brightness)等光谱特征,形状指数(shape index)、长宽比(length-width ratio)等形状特征,以及GLCM和GLDV两种类型的多种纹理特征等。按照要求选择样本后进行特征空间优化,即基于各类别的样本及初始特征集,找到类别之间区别最大的特征组合,作为分类的最优特征集。优化目的在于避免采用过多特征导致分类特征冗余、计算量增大、分类精度降低等问题。考虑到软件运行负荷和距离,最终选择用10个特征:Ratio R,Ratio G,Ratio B,Shape index,Mean R,Mean G,Mean B,GLCM Dissimilarity,GLCM Correlation,VI’。VI’是模拟归一化植被指数(normalized difference vegetation index,NDVI)提取植被的一个参数[19],其公式为:
(1)
确定最优特征空间后进行分类,提取出树冠。结果文件以shp格式输出,叠加分类图到原始影像上。少量地面被错分到树冠类,使用编辑器直接修正分类结果;合并少量分割过度的树冠;修改错误分类的部分。经多次修正检查后,完成分类结果整饰。
4 结果与讨论
4.1 树冠参数提取及分析
由于缺少野外实地调查数据,因而对原始影像目视解译,得到的树冠提取结果被视为参考图,且参考图被认为是树冠的准确表达。对比参考图和上一步自动提取结果,分析二者间的差异,以此衡量基于面向对象方法的树冠提取精度。分别提取参考图和自动提取结果的郁闭度、单元面积树木数两个参数。由于所选研究区面积不是很大,所以分别从参考图和自动提取结果中选择对应的20个树冠,再分别提取这20个树冠的东西冠幅和南北冠幅。计算公式分别是:
(2)
(3)
(4)
(5)
式中,D代表郁闭度,Ac代表树冠总面积,A代表研究区面积。N代表单元面积树木数,Nc代表树木棵数。W、L分别代表单个树冠东西向、南北向冠幅,Ymax、Ymin、Xmax、Xmin分别代表树冠区域的最大Y坐标、最小Y坐标、最大X坐标、最小X坐标。对比结果见图6,表1,表2。
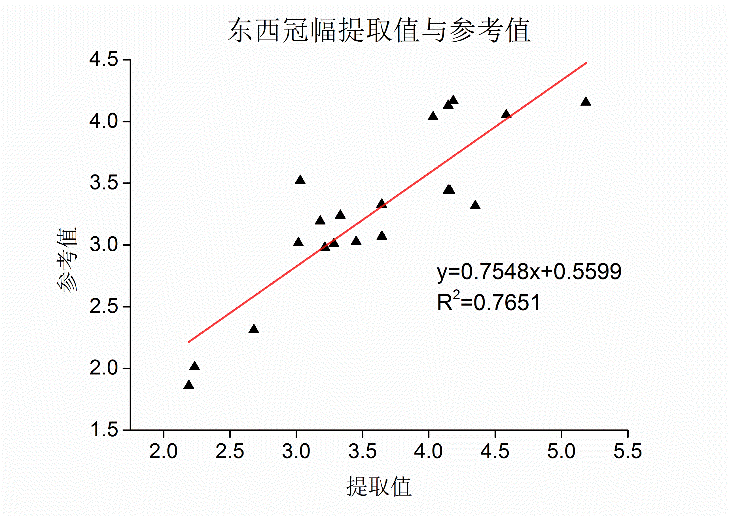
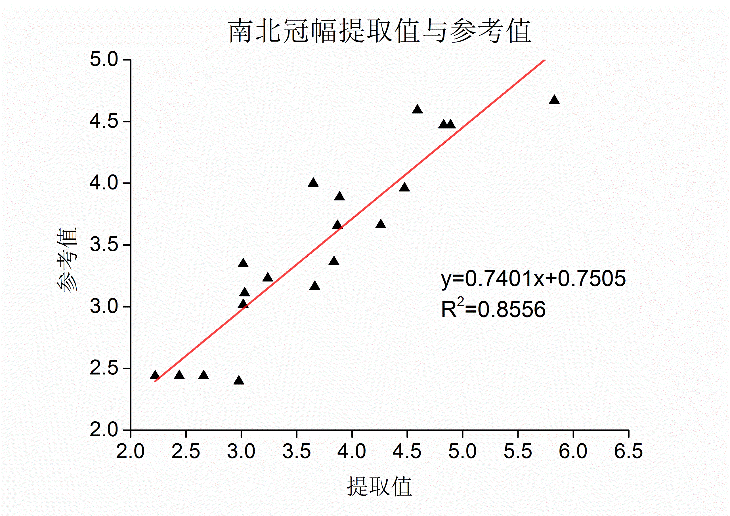
图6 树冠冠幅提取值与参考值散点图
表1 提取值与参考值对比(单元面积树木数与郁闭度)
| 单元面积树木数 | 郁闭度 | |
| 提取值 | 0.0074 | 0.3138 |
| 参考值 | 0.0073 | 0.2896 |
| 精度 | 0.99 | 0.92 |
表2 提取值与参考值对比( 冠幅)
| 树冠编号 | 提取值(米) | 参考值(米) | 精度 | |||||||
| 南北冠幅 | 东西冠幅 | 均值 | 南北冠幅 | 东西冠幅 | 均值 | 南北冠幅 | 东西冠幅 | 均值 | ||
| 1 | 2.44 | 2.23 | 2.34 | 2.44 | 2.01 | 2.23 | 1.00 | 0.90 | 0.95 | |
| 2 | 2.66 | 2.68 | 2.67 | 2.44 | 2.31 | 2.38 | 0.92 | 0.86 | 0.88 | |
| 3 | 3.02 | 3.22 | 3.12 | 3.02 | 2.98 | 3.00 | 1.00 | 0.93 | 0.96 | |
| 4 | 2.22 | 2.19 | 2.21 | 2.44 | 1.86 | 2.15 | 0.91 | 0.85 | 0.97 | |
| 5 | 3.84 | 3.45 | 3.64 | 3.36 | 3.03 | 3.20 | 0.88 | 0.88 | 0.88 | |
| 6 | 3.87 | 3.65 | 3.76 | 3.66 | 3.07 | 3.36 | 0.95 | 0.84 | 0.90 | |
| 7 | 2.98 | 3.28 | 3.13 | 2.40 | 3.01 | 2.70 | 0.80 | 0.92 | 0.86 | |
| 8 | 3.02 | 3.03 | 3.02 | 3.35 | 3.52 | 3.43 | 0.90 | 0.86 | 0.88 | |
| 9 | 3.66 | 4.16 | 3.91 | 3.16 | 3.44 | 3.30 | 0.86 | 0.83 | 0.84 | |
| 10 | 3.02 | 3.02 | 3.02 | 3.02 | 3.02 | 3.02 | 1.00 | 1.00 | 1.00 | |
| 11 | 4.89 | 4.15 | 4.52 | 4.47 | 3.44 | 3.96 | 0.91 | 0.83 | 0.87 | |
| 12 | 5.83 | 5.18 | 5.51 | 4.67 | 4.15 | 4.41 | 0.80 | 0.80 | 0.80 | |
| 13 | 3.65 | 4.03 | 3.84 | 4.00 | 4.04 | 4.02 | 0.91 | 1.00 | 0.96 | |
| 14 | 4.83 | 4.58 | 4.71 | 4.47 | 4.05 | 4.26 | 0.93 | 0.88 | 0.91 | |
| 15 | 4.59 | 4.15 | 4.37 | 4.59 | 4.13 | 4.36 | 1.00 | 1.00 | 0.99 | |
| 16 | 3.03 | 3.18 | 3.11 | 3.11 | 3.19 | 3.15 | 0.97 | 1.00 | 0.99 | |
| 17 | 3.24 | 3.64 | 3.44 | 3.23 | 3.33 | 3.28 | 1.00 | 0.91 | 0.95 | |
| 18 | 4.48 | 4.18 | 4.33 | 3.96 | 4.17 | 4.06 | 0.88 | 1.00 | 0.94 | |
| 19 | 4.26 | 4.35 | 4.30 | 3.66 | 3.32 | 3.49 | 0.86 | 0.76 | 0.81 | |
| 20 | 3.89 | 3.33 | 3.61 | 3.89 | 3.24 | 3.56 | 1.00 | 0.97 | 0.99 | |
4.2 讨论
如图6所示,自动提取的树冠与人工勾绘的树冠呈较强的线性关系。自动提取的东西冠幅和人工勾绘的东西冠幅的R2达0.7651,自动提取的南北冠幅和人工勾绘的南北冠幅的R2达0.8556。这表明,基于面向对象的无人机高分影像树冠信息提取是可行的,精度较高,可有效替代人工目视解译,减少劳动成本。
从表1、表2可看出,基于面向对象提取的郁闭度、冠幅大小、单元面积树木数总体上大于人工提取的结果。导致这一现象的原因是:获取研究区无人机影像时,影像不可避免地受到阴影的影响。阴影与某些树冠在纹理、光谱特征上差异不明显,从而被误分到树冠,导致树冠自动提取结果的相关参数总体上大于真实情况。
5 结论
树冠可用来估测树木胸径、树高、单木材积、林分郁闭度和生物量等重要参数,是监测树木长势、调查森林资源的关键指标之一,其获取是建立森林定量化管理平台的关键[20]。随着无人机遥感和信息提取技术的发展,高空间分辨率的无人机影像使快速、准确获取树冠信息成为可能。论文基于面向对象方法,利用无人机遥感影像,提取四川贡嘎山雅家梗内某一区域亚高山针叶林的树冠及参数。关键技术和步骤包括:无人机影像获取,影像预处理,最佳分割尺度确定,最优特征空间选择,最邻近分类,结果整饰,参数提取及精度对比分析。结果精度较高,自动提取的东西冠幅和南北冠幅与真实冠幅的R2分别达0.7651、0.8556,单元面积树木数和郁闭度的提取精度分别达0.99、0.92。这验证了基于面向对象的无人机高分影像树冠信息提取的可行性和可靠性。
目前的单木树冠提取往往仅针对特定的树种和立地条件进行,没有适合所有林分的提取方法。论文提出的参数提取方法主要针对相对稀疏的亚高山针叶林,研究区内树种相对单一,树冠交叉或重叠现象较少,针对该现象的树冠参数信息提取是下一步的研究工作。无人机影像不可避免地带有阴影,这会造成树冠提取的精度损失,如何减少甚至消除阴影的影响有待进一步研究。初始特征集的选择会影响后续最优特征空间的确定,因而后面的工作将选择基于更多不同初始特征集下的最优特征组合参与分类,以提高精度。在做精度验证时,有条件的情况下,应尽量获取地面实地调查数据作为参考。将人工目视解译结果作为参考时,应尽量有多名具有相关专业背景的人员参与解译,以增加验证的可靠性。
参考文献:
- 覃先林,李增元,易浩若. 高空间分辨率卫星遥感影像树冠信息提取方法研究[J]. 遥感技术与应用,2005,20(2):228-232.
- 林波,刘庆. 四种亚高山针叶林树种的表型可塑性对不同光照强度的响应[J]. 生态学报,2008,28(10):4665-4675.
- Adam C, Vincent G, Everett A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use[J]. Remote Sensing, 2012, 4(6):1671-1692.
- 李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版),2014,39(5):505-513.
- 樊仲谋. 摄影测树原理与技术方法研究[D].北京:北京林业大学,2015.
- 吕晓君, 王君, 喻卫国,等. 无人机监测林业有害生物初探[J]. 湖北林业科技, 2016, 45(4):30-33.
- Hernández J G, Ferreiro E G, Sarmento A, et al. Using high resolution UAV imagery to estimate tree variables in Pinus pinea plantation in Portugal[J]. 2016, 25(2):eSC09.
- Panagiotidis D, Abdollahnejad A, Surový P, et al. Determining tree height and crown diameter from high-resolution UAV imagery[J]. 2017.
- 罗辑,杨忠,杨清伟. 贡嘎山森林生物量和生产力的研究[J]. 植物生态学报,2000,24(2):191-196.
- 冉飞,梁一鸣,杨燕,杨阳,王根绪. 贡嘎山雅家埂峨眉冷杉林线种群的时空动态[J]. 生态学报,2014,34(23):6872-6878.
- 崔志祥,申亚鹏,马廷刚. PhotoScan近景影像数字三维建模中影像摄影方式的研究[J]. 测绘技术装备, 2016,18(4):10-12.
- 周春艳, 王萍, 张振勇,等. 基于面向对象信息提取技术的城市用地分类[J]. 遥感技术与应用, 2008, 23(1):31-35.
- 李莉. 面向对象的高分辨率遥感影像信息提取研究[D]. 成都:成都理工大学, 2012.
- 唐天琦. 面向对象的高分辨率遥感影像植被信息提取研究[D]. 长春:吉林大学, 2015.
- 面向对象影像分析中的尺度问题研究[D]. 北京:中国科学院遥感应用研究所, 2003.
- 张俊,朱国龙,李妍. 面向对象高分辨率影像信息提取中的尺度效应及最优尺度研究[J]. 测绘科学,2011,36(2):107-109.
- Drǎguţ L, Tiede D, Levick S R. ESP: a tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data[J]. International Journal of Geographical Information Science, 2010, 24(6):859-871.
- 易凤佳, 李仁东, 常变蓉. 基于面向对象的长株潭地区遥感影像分类方法[J]. 华中师范大学学报(自科版), 2014, 48(6):910-916.
- 何游云. 无人机遥感估测林木地上生物量的研究[D]. 北京:北京林业大学, 2016.
- 周艳飞, 张绘芳, 李霞,等. 基于高分辨遥感数据的胡杨与柽柳树冠提取[J]. 遥感技术与应用, 2015, 30(3):510-517.
- 项目背景:国家自然科学基金面上项目“基于背包式MLS 与UAV 遥感协同的单木-林分尺度森林地上生物量精细反演”(41471281),2015-2018.作者介绍:林家元(1975-),男,博士,副教授,硕士生导师,长期从事无人机山地灾害与环境遥感方面的研究。
Email: joeylin@swu.edu.cn. ↑
