投稿单位:
辽宁众云图测绘科技有限公司
投稿人:王庆海
2018年11月24日
一、项目背景
露天矿采场验收测量、生产测量、工程测量、矿图绘制等需要外业数据采集的工作以往全是利用全站仪、RTK等传统测量设备进行。其中问题突显,一是测绘环境恶劣,现场开采时的扬尘影响仪器的观测效果,二是测绘人员与机械设备在同一工作面作业,易发生危险,三是人工采集的点主要是地形变化的特征点,无法全面的反映地形的变化,方量准确性较低。
飞马多旋翼无人机D200针对露天矿山的特殊地形及测绘作业环境进行了设计。可搭载包括正射相机、倾斜相机、三维激光LiDar等多种传感器,同时可以适应地形飞行,以满足矿山测绘的不同工作需求,为矿山的测绘工作带来新的技术手段。本案例以内蒙古某露天煤矿为研究背景,用飞马多旋翼无人机D200搭载单正射相机、机载Lidar传感器获取测量数据,验证其点位及高程精度,进而将其应用于露天矿土石方量的计算。
二、技术路线
本案例的技术路线是飞马D200多旋翼无人机挂载单正射相机、机载Lidar(单正射相机可获取测区内DOM、DSM,为变高飞行提供基础数据。机载Lidar获取测区两期点云数据,时间间隔1天,5级风情况下两期点云数据获取,研究风力对设备系统误差的影响。同时分析不同航速下获取的点云精度及作业效率,分析变高飞行区与等高飞行区点云精度的一致性。以及获取测区DEM)对测区进行数据采集,通过数据处理最终生成DOM、DSM、DEM及DLG等成果,用于精度分析及实用性研究。事先在测区内布设足够多的高精度的检查点,待飞行完成后,通过对比相应检查点及地物特征点的平面和高程差异来评定无人机的航测精度是否满足大比例尺测图的精度要求。
三、实际作业流程
1.场地选择
考虑到矿区地形起伏变化、测区内机械状况、无人机优势特点、方便成果精度对比检查等因素,经综合考虑,我们选择以下场地进行研究。
图1 测区示意图(1.19平方公里)
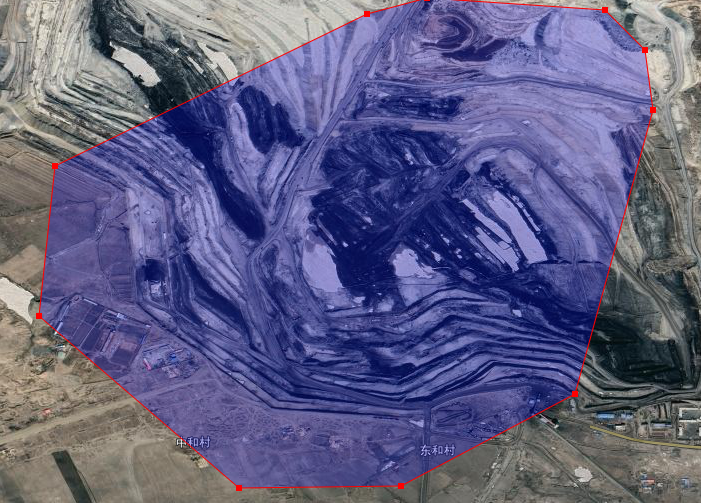
图2 测区示意图(3.5平方公里)
分别选择面积1.19平方公里和3.5平方公里的两个区域,测区内地形起伏变化较大,且该区域风力较大,具有露天矿区的一般代表性。
2.数据采集与处理软硬件配置
表1
3.外业检查点的分布与采集
测区选好后组织人员在测区范围内制作高精度检查点标识及采集检查点坐标。并计算测区范围内不同坐标系之间的转换参数。
外业检查点采用RTK采集方式获取,通过连接连续运行参考站(CORS),在固定解状态下采集检查点,分别分布在不同的高程梯面上,且没有因为开采而导致高程有明显变化。具体分别位置如下图所示。




图3 四个区域布设外业检查点


图4 外业检查点采集
4.使用无人机对测区进行不同挂载传感器采集数据工作
具体内容如下表。
表2
| 序号 | 无人机 | 挂载 | 工作内容 |
| 1 | D200 | 单正射相机 | 1.获取测区内DOM\DSM,为变高飞行提供基础数据。
2.进行变高飞行与等高飞行DOM的精度对比。 |
| 2 | D200 | 机载Lidar | 1.获取测区两期点云数据,时间间隔1天。
2.不同航速下获取的点云精度及作业效率分析。 3.分析变高飞行区与等高飞行区点云精度的一致性。 4.在5级风情况下进行两期点云数据获取,研究风力对设备系统误差的影响。 |
本次研究内容包括垂直摄影测量、激光点云采集两种采集方式。测区首先施行300米高度飞行(约6cm/px)采集正射影像,整个飞行不变高,得到精确的地形DSM;然后搭载雷达自适应地形飞行,保持对地高度60米,采集激光点云数据。飞行完毕后,连接飞机,下载飞机记录数据、照片数据、点云数据等,以备内业数据处理。

图5 地面基准站任意点架设
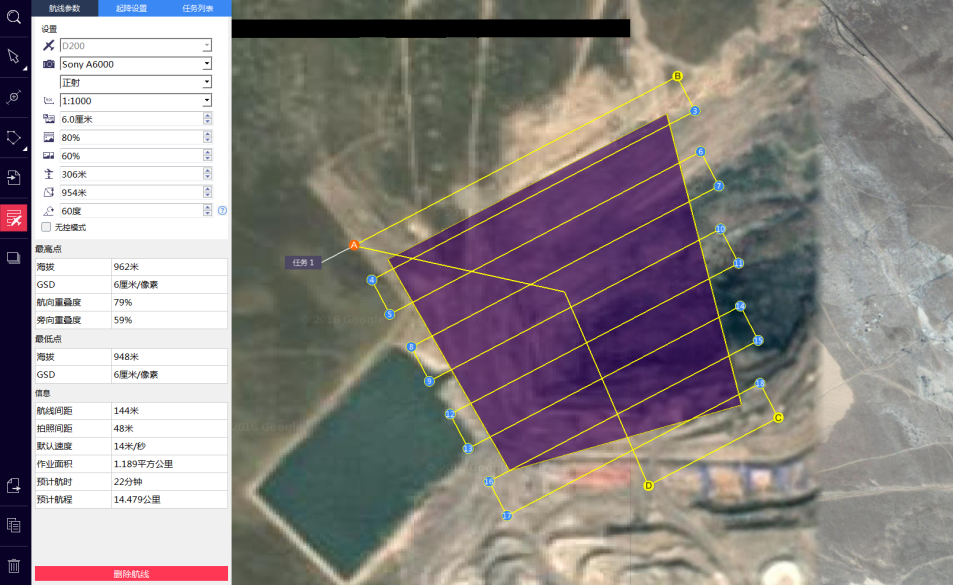
图6 正射航线规划
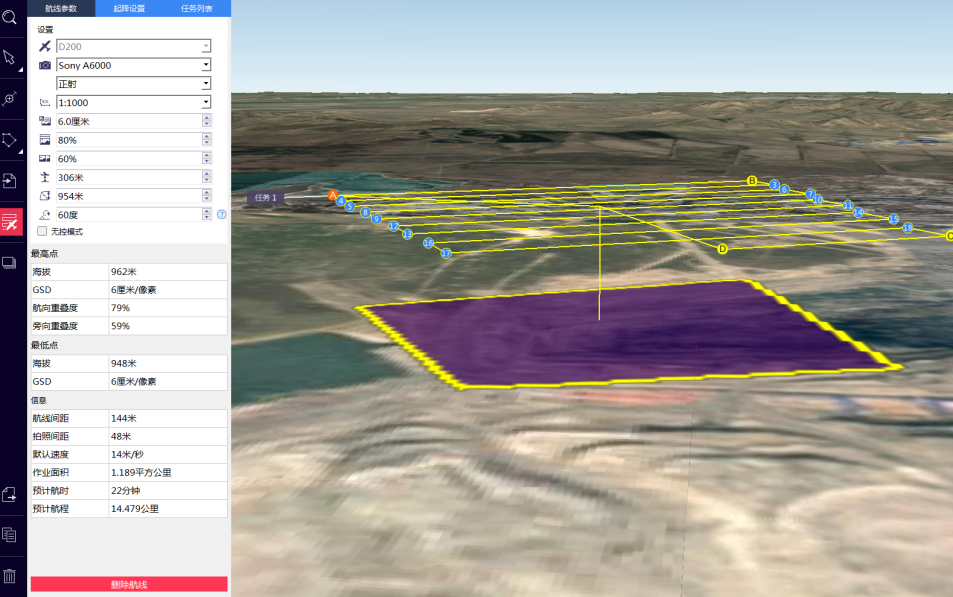
图7 正射航线三维预览
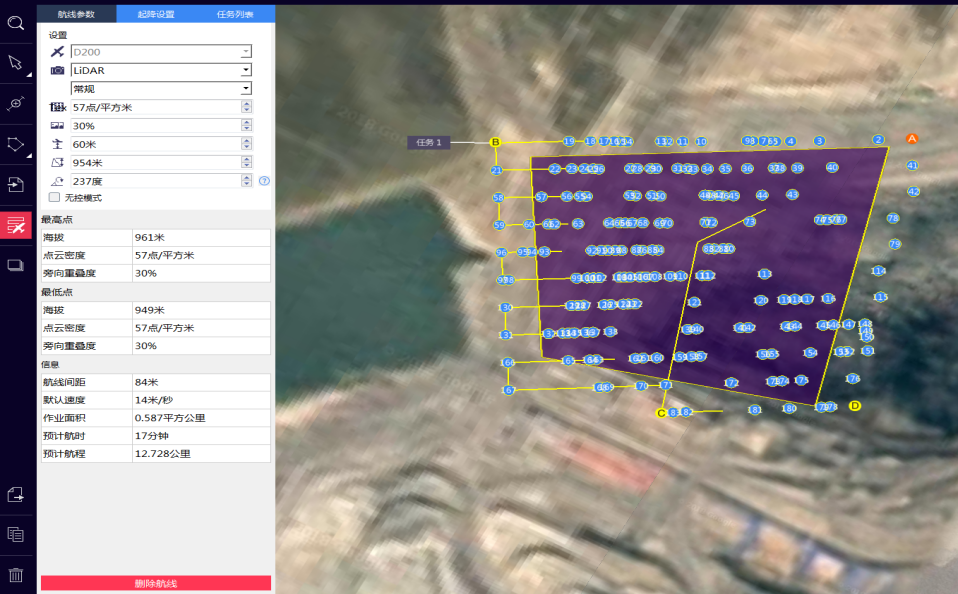

图9 激光雷达航线三维预览
4.1飞马D200无人机外业数据采集各架次完成情况统计
D200无人机在外业采集过程中,累计飞行21架次,其中各架次完成情况如下。
表3
注:其中机载LiDAR100激光器为Velodyne Puck;机载LiDAR100激光器为RIEGL。
4.2飞马D200无人机各架次航线参数设计及效率
| 架次 | 机型 | 测区面积 | 航时 | 基本参数 | 成果 |
| 1 | D200 | 1.2Km2 | 22min | 重叠度:80%/60% ,对地高度:306米,地面分辨率:6cm | 241张影像 |
| 2 | D200 | 0.587Km2 | 2min | 重叠度:25% ,对地高度:60米,点云密度:57点/平方米 | 1.27亿点 |
| 3 | D200 | 1.686Km2 | 36min | 重叠度:80%/60% ,对地高度:255米,地面分辨率:5cm | 575张影像 |
| 4 | D200 | 1.79Km2 | 35min | 重叠度:30% ,对地高度:60米,点云密度:57点/平方米 | 3.9亿点云 |
| 5 | D200 | 31min | 3.6亿点云 | ||
| 6 | D200 | 1.68Km2 | 33min | 重叠度:30% ,对地高度:60米,点云密度:57点/平方米 | 3.7亿点云 |
| 7 | D200 | 17min | 1.2亿点云 | ||
| 8 | D200 | 0.6Km2 | 19min | 重叠度:30% ,对地高度:60米,点云密度:57点/平方米 | 1.2亿点云 |
| 9 | D200 | 0.144Km2 | 8min | 重叠度:30% ,对地高度:60米,点云密度:57点/平方米 | 0.25亿点云 |
| 10 | D200 | 1.124 Km2 | 24min | 重叠度:80%/60% ,对地高度:255米,地面分辨率:5cm | 338张影像 |
表4
5.数据处理
5.1 Lidar内业处理流程
(1)点云预处理
主要采用飞马无人机管家进行点云的预处理,输出标准点云供点云后处理软件使用。
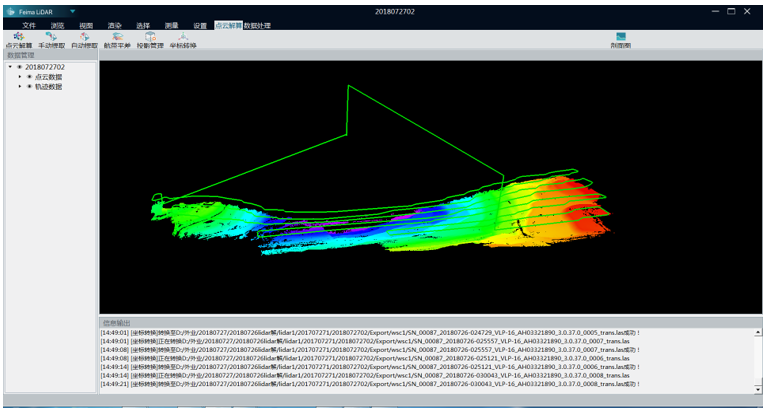
图10 点云数据预处理
1)点云轨迹解算
采用Smart GNSS模块进行GPS/IMU的联合解算,解算出点云的轨迹文件
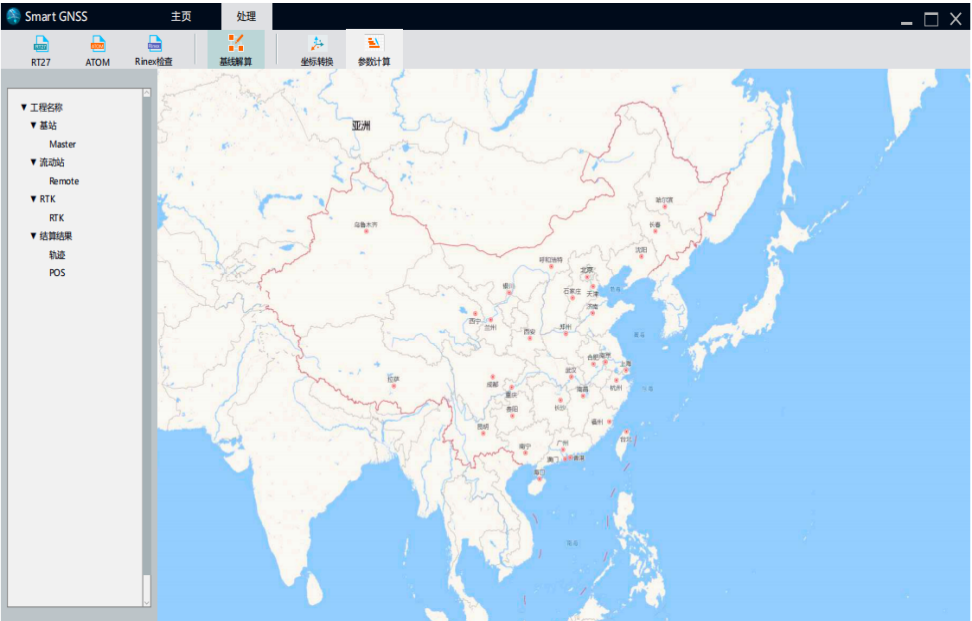
图11 点云轨迹解算1
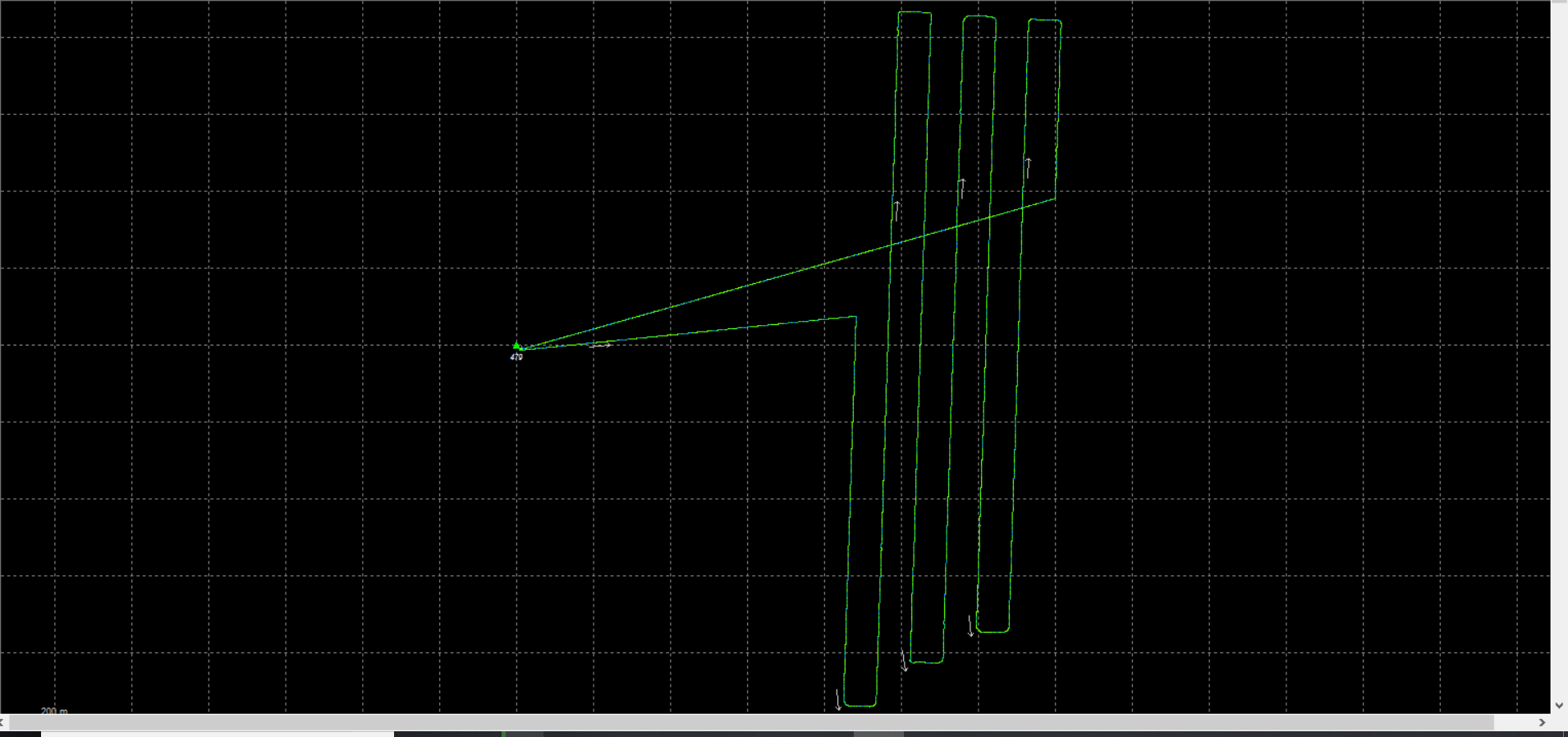
图12 点云轨迹解算2
2)、点云解算
采用智激光模块进行点云数据解算,基于原始点云数据和轨迹文件计算输出标准化点云成果。

图13 点云解算
按照航带进行渲染,检查航带接边误差,若大于阈值,则进行面片提取,并自动进行航带平差。由下图可知此次数据航带间不存在明显接变问题。

图14 航带平差
3) 点云赋色
应用测区正射影像数据,则可进行点云赋色,更直观的展示点云。
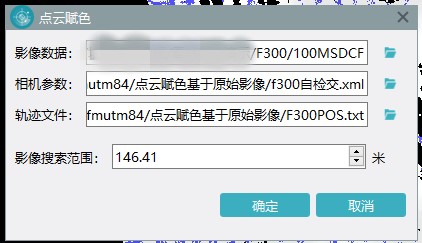
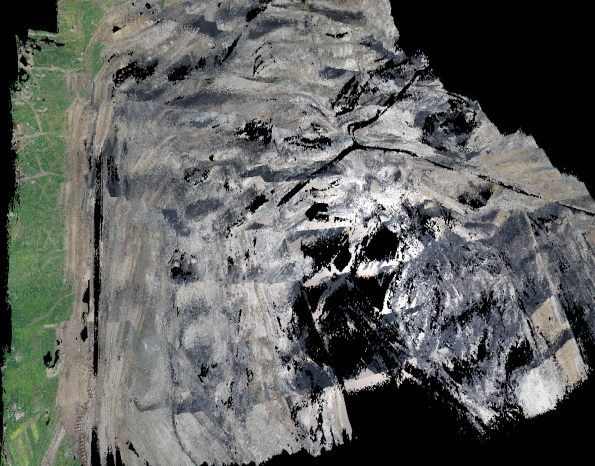
图15 点云赋色
4)点云坐标变换
由于目标坐标系为地方坐标系(北京54),而点云默认解算为WGS84坐标系,因此采用七参数进行坐标转换。然后采用该参数进行点云数据投影变换,转换为矿区坐标系。
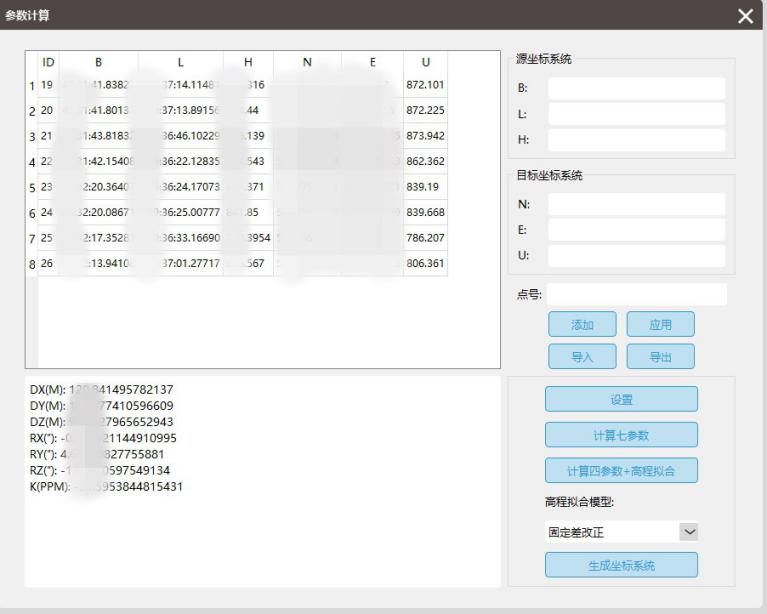
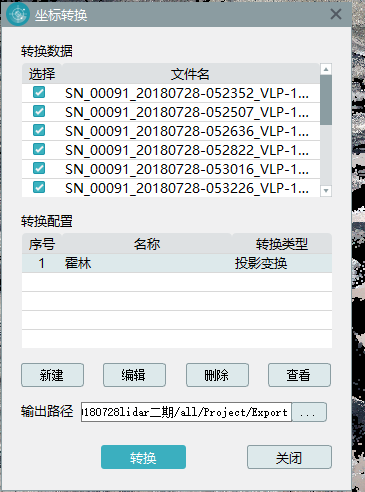
图16 点云坐标变换
5)、消除冗余
航带间点云重叠较多大时,由于靠近航带边缘的点云精度稍差,因此可采用消除冗余功能进行航带间重叠点云的剔除。
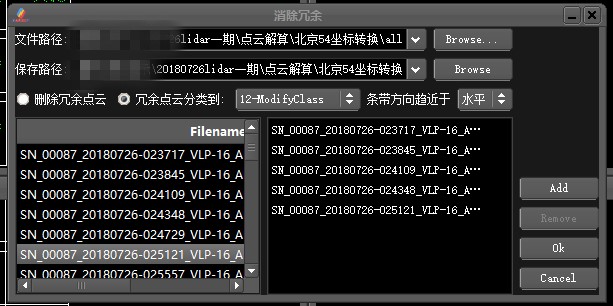
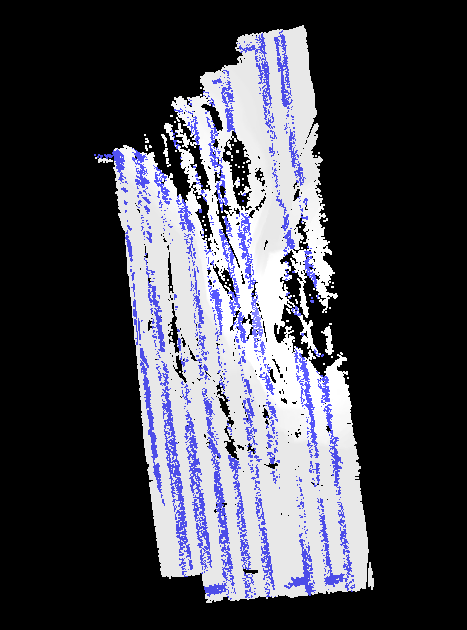
图17 剔除航带间重叠点
(2)点云后处理
采用LIDAR_DP点云后处理软件进行。
作业流程:
点云分块——点云去噪——自动滤波——人工交互编辑——分块DEM输出——接边合并
1)点云分块:
当点云数据量过大时,需采用分块处理,提高处理效率,减少数据处理对硬件的依赖。
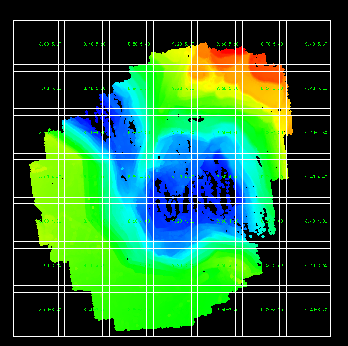
图18 点云分块
2)、点云去噪
采用点云去噪功能进行飞点和低点去除。
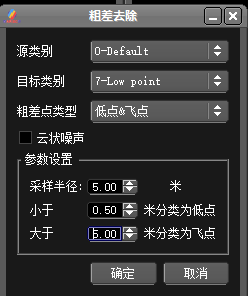
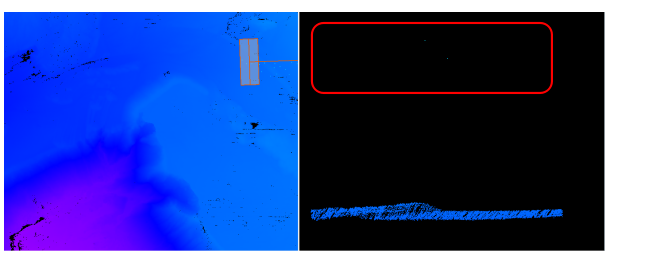
图19 点云去噪
3)点云自动滤波及分类
通过地面点的分类算法(三角网TIN模型迭代分类算法)分离出未分类层(Unclassify层)中的地面点。
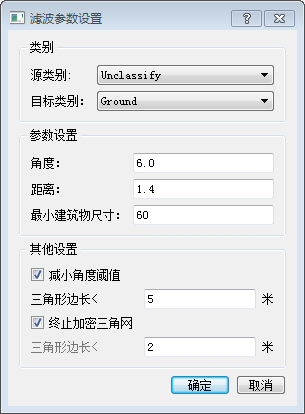
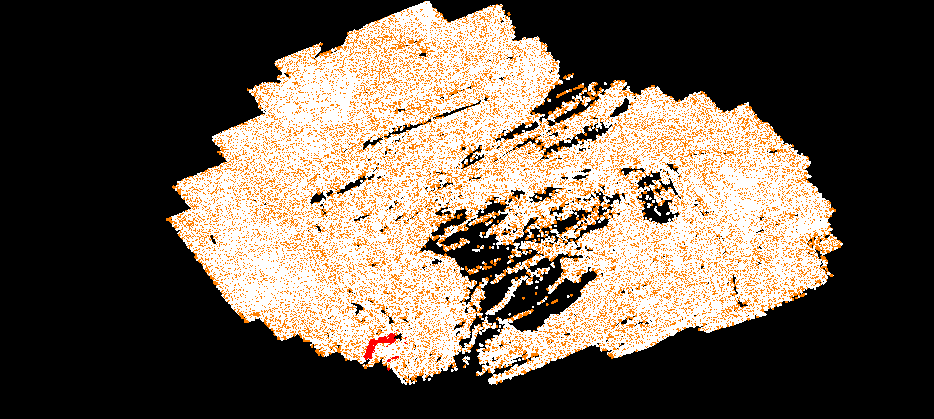
图20 类别显示
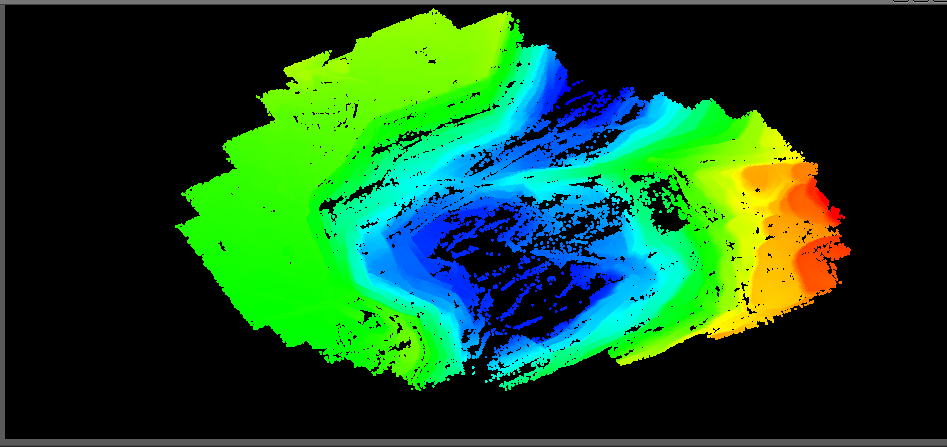
图21 地面点高程渲染
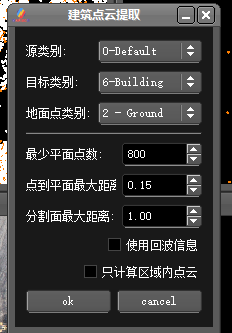
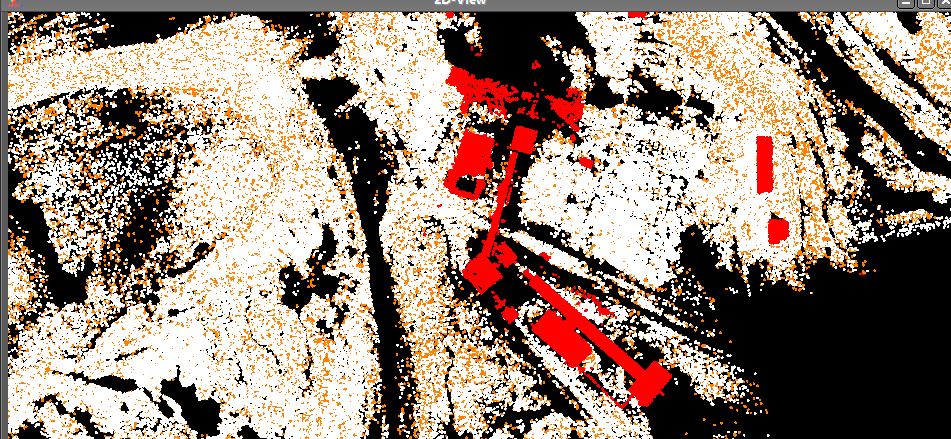
图22 点云分类图
4)人机交互分类
通过多个视图结合DOM、剖面图等信息将点云通过编辑工具手工分类。

图23 多视图观察分类图
图24将未正确分类的点云进行重新分类
5)、分块DEM输出
将编辑好的点云按照图幅进行成果输出。
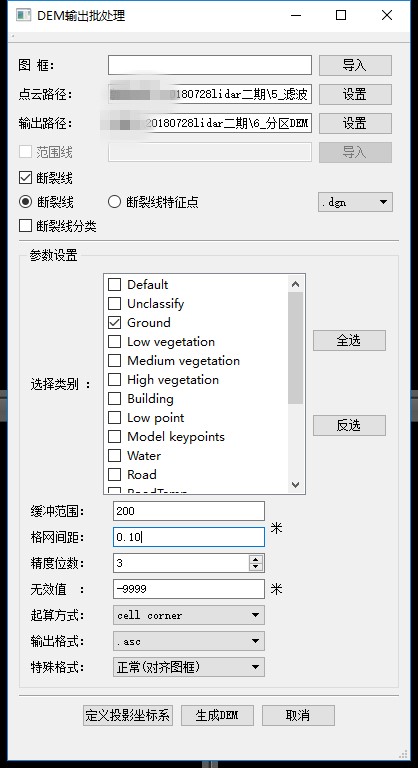
图25 输出DEM
6)、 DEM接边合并
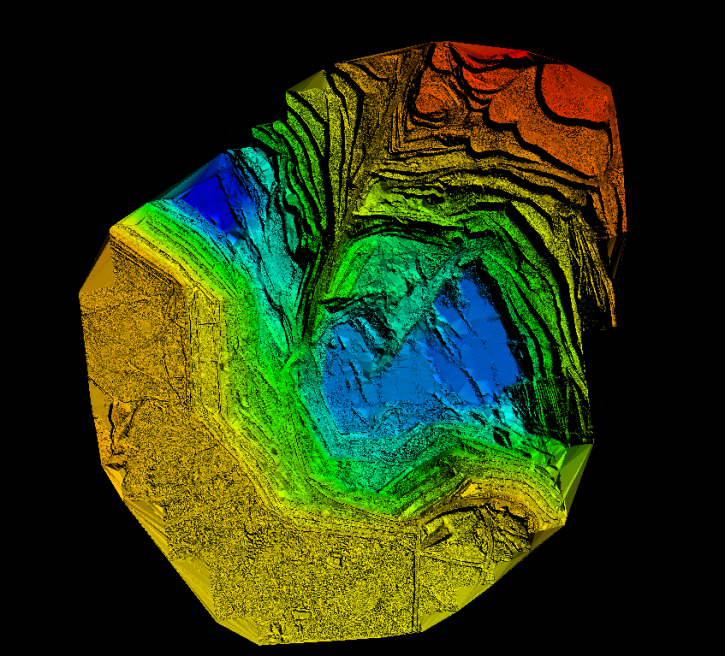
图26 DEM接边
5.2点云矢量化数据编辑
LidarFeature点云矢量化采集软件根据点云数据便捷的进行坡顶、坡底线的采集,生成高精度符合矿山测绘要求的DEM数据模型。
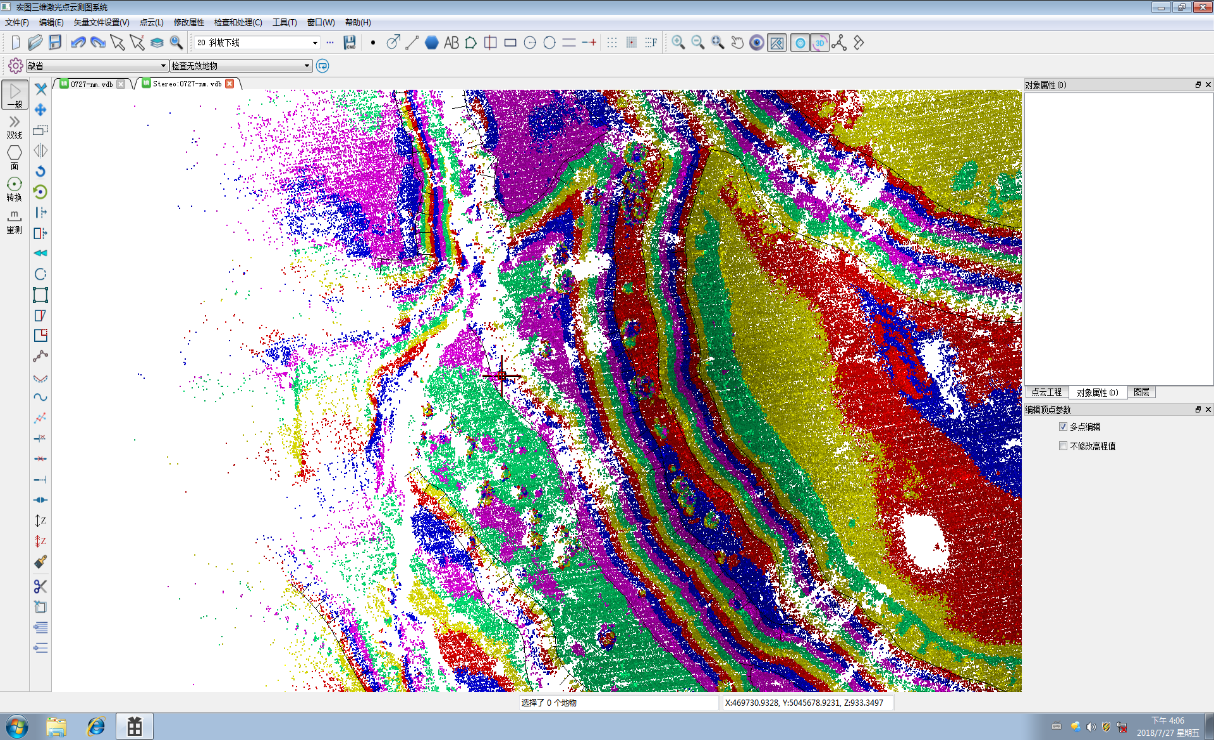
图27 利用点云进行矢量化并在软件中显示

图28 矢量化后坡坎线在软件中显示
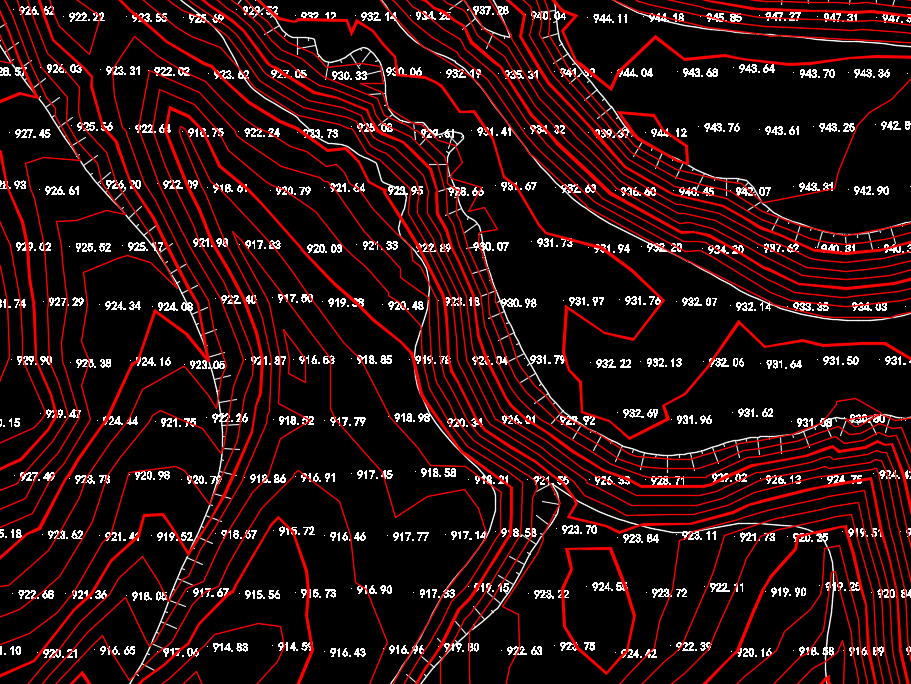
图29 通过点云矢量化得到的DLG线划图
通过LidarFeature软件也可以自动生成等高线或导出高程点,然后生成三角网数据。可以导入3DMINE软件中生成DEM模型,用于作为方量的分析的基础数据。
5.3 应用Global Mapper软件计算土石方量
(1)土方量所需数据:
1)基准地形数据:即挖方填方的基准地形数据,可以是点云,也可以是DEM,
2)待测地形数据:待计算土方量的新地形数据,可以是点云,也可以是DEM,
(2)土方量的计算包括两种方式:
1)格网计算:基于DEM成果
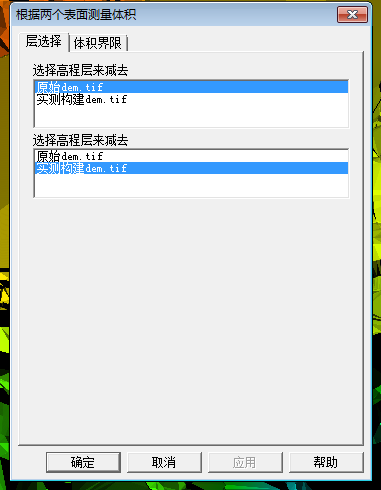
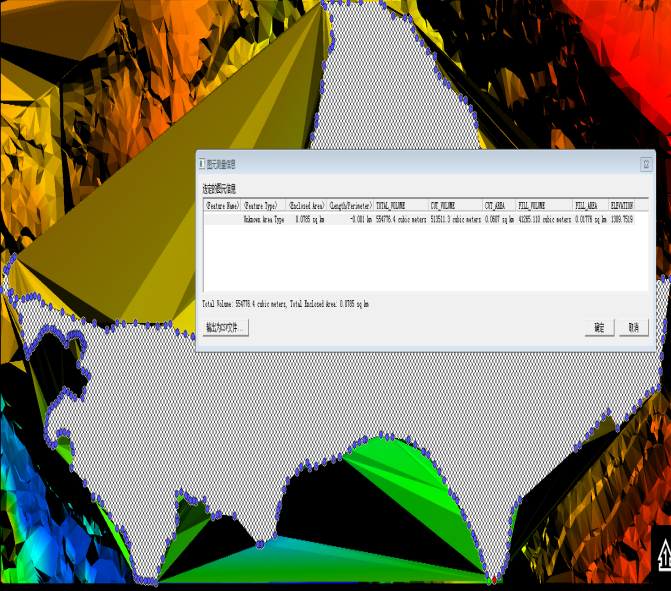
图30 计算土石方量(1)
2)三角网计算,基于点云构建三角网
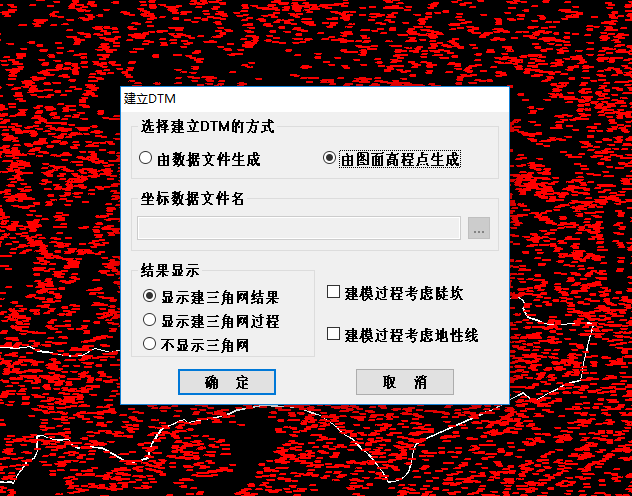
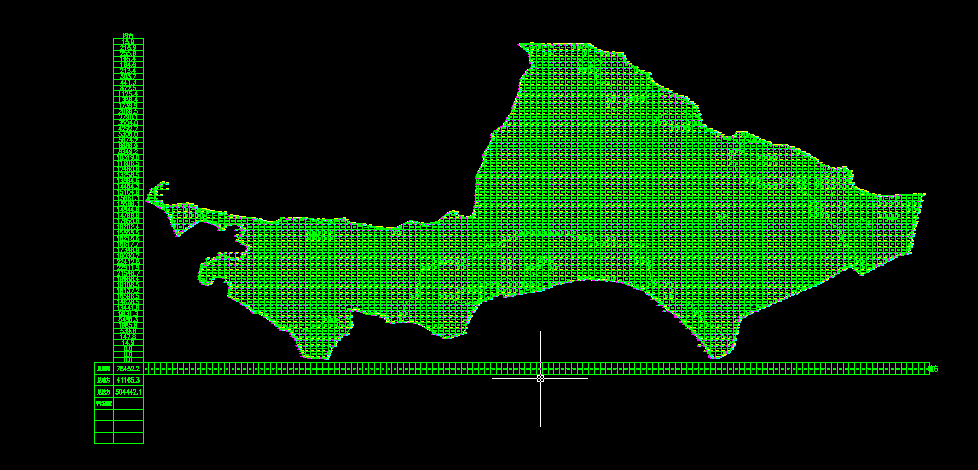
图31 计算土石方量(2)
6.精度分析
6.1技术要求
6.1.1定位基准
(1)坐标系统:北京54国家坐标系
(2)高程基准:1985国家高程基准
(3)投影方法:高斯-克吕格3度带正形投影,中央子午线为120°E
6.1.2精度要求指标
(1)平面精度
表5
| 分类 | 比例尺 | 点位中误差(m) | 临近地物点间距中误差(m) |
| 城镇、工业建筑区、平地、丘陵地 | 1:500 | ±0.15(±0.25) | ±0.12(±0.20) |
| 1:1000 | ±0.30(±0.50) | ±0.24(±0.40) | |
| 1:2000 | ±0.60(±1.00) | ±0.48(±0.80) |
(2)高程精度
1)图根点相对于图根起算点的高程中误差:不应大于0.20m;
2)高程注记点相对于邻近图根点的高程中误差:不应大于0.17m。
(3)方量精度
方量误差不超过总量的1.5%。
6.2飞马Lidar 100精度检查
6.2.1 DSM上的单点高程精度检查
两期点云数据(时间间隔1天)外业点位高程精度检查。分别在不同高程面采集外业检查点,共采集114个地面检查点。检查点精度情况如下表所示。
表6 单位:m
| 点名 | 检查点H | 7月26日雷达H | 7月28日雷达H | 7月26日雷达△H | 7月28日雷达△H | 两次点云高差 |
| dy01 | 864.966 | 864.96 | 865.001 | 0.006 | -0.035 | -0.041 |
| dy02 | 865.091 | 865.075 | 865.066 | 0.016 | 0.025 | 0.009 |
| dy03 | 865.342 | 865.323 | 865.34 | 0.019 | 0.002 | -0.017 |
| dy04 | 829.722 | 829.705 | 829.721 | 0.017 | 0.001 | -0.016 |
| dy05 | 829.714 | 829.705 | 829.719 | 0.009 | -0.005 | -0.014 |
| dy06 | 830.078 | 830.084 | 830.064 | -0.006 | 0.014 | 0.02 |
| dy07 | 829.986 | 829.997 | 829.99 | -0.011 | -0.004 | 0.007 |
| dy08 | 829.962 | 829.999 | 829.931 | -0.037 | 0.031 | 0.068 |
| dy09 | 829.842 | 829.862 | 829.87 | -0.02 | -0.028 | -0.008 |
| dy10 | 829.47 | 829.473 | 829.465 | -0.003 | 0.005 | 0.008 |
| dy11 | 828.895 | 828.875 | 828.92 | 0.02 | -0.025 | -0.045 |
| dy12 | 828.389 | 828.344 | 828.416 | 0.045 | -0.027 | -0.072 |
| dy13 | 828.383 | 828.339 | 828.408 | 0.044 | -0.025 | -0.069 |
| dy14 | 828.661 | 828.656 | 828.679 | 0.005 | -0.018 | -0.023 |
| dy15 | 828.663 | 828.656 | 828.68 | 0.007 | -0.017 | -0.024 |
| dy16 | 828.351 | 828.328 | 828.313 | 0.023 | 0.038 | 0.015 |
| dy17 | 828.345 | 828.333 | 828.318 | 0.012 | 0.027 | 0.015 |
| dy18 | 827.655 | 827.603 | 827.684 | 0.052 | -0.029 | -0.081 |
| dy19 | 827.656 | 827.599 | 827.677 | 0.057 | -0.021 | -0.078 |
| dy20 | 827.916 | 827.905 | 827.927 | 0.011 | -0.011 | -0.022 |
| dy21 | 827.922 | 827.907 | 827.931 | 0.015 | -0.009 | -0.024 |
| dy22 | 827.588 | 827.552 | 827.552 | 0.036 | 0.036 | 0 |
| dy23 | 827.586 | 827.555 | 827.553 | 0.031 | 0.033 | 0.002 |
| dy24 | 826.773 | 826.789 | 826.817 | -0.016 | -0.044 | -0.028 |
| dy25 | 826.786 | 826.786 | 826.815 | 0 | -0.029 | -0.029 |
| dy26 | 827.144 | 827.109 | 827.165 | 0.035 | -0.021 | -0.056 |
| dy27 | 827.142 | 827.112 | 827.166 | 0.03 | -0.024 | -0.054 |
| dy28 | 826.861 | 826.829 | 826.838 | 0.032 | 0.023 | -0.009 |
| dy29 | 826.85 | 826.838 | 826.851 | 0.012 | -0.001 | -0.013 |
| dy30 | 826.665 | 826.647 | 826.778 | 0.018 | -0.113 | -0.131 |
| dy31 | 826.662 | 826.664 | 826.731 | -0.002 | -0.069 | -0.067 |
| dy32 | 826.687 | 826.674 | 826.714 | 0.013 | -0.027 | -0.04 |
| dy33 | 826.668 | 826.648 | 826.72 | 0.02 | -0.052 | -0.072 |
| dy34 | 826.663 | 826.665 | 826.775 | -0.002 | -0.112 | -0.11 |
| dy35 | 826.683 | 826.684 | 826.793 | -0.001 | -0.11 | -0.109 |
| dy36 | 826.678 | 826.669 | 826.743 | 0.009 | -0.065 | -0.074 |
| dy37 | 826.676 | 826.685 | 826.795 | -0.009 | -0.119 | -0.11 |
| dy38 | 826.674 | 826.671 | 826.714 | 0.003 | -0.04 | -0.043 |
| dy39 | 826.677 | 826.686 | 826.795 | -0.009 | -0.118 | -0.109 |
| dy40 | 826.677 | 826.687 | 826.781 | -0.01 | -0.104 | -0.094 |
| dy41 | 826.67 | 826.664 | 826.77 | 0.006 | -0.1 | -0.106 |
| dy42 | 826.656 | 826.655 | 826.751 | 0.001 | -0.095 | -0.096 |
| dy43 | 826.655 | 826.641 | 826.746 | 0.014 | -0.091 | -0.105 |
| dy44 | 826.654 | 826.643 | 826.751 | 0.011 | -0.097 | -0.108 |
| dy45 | 825.891 | 826.02 | 825.937 | -0.129 | -0.046 | 0.083 |
| dy46 | 825.836 | 825.931 | 825.876 | -0.095 | -0.04 | 0.055 |
| dy47 | 825.81 | 825.799 | 825.82 | 0.011 | -0.01 | -0.021 |
| dy48 | 825.85 | 825.824 | 825.796 | 0.026 | 0.054 | 0.028 |
| dy49 | 825.84 | 825.761 | 825.835 | 0.079 | 0.005 | -0.074 |
| dy50 | 825.868 | 825.758 | 825.832 | 0.11 | 0.036 | -0.074 |
| dy51 | 825.86 | 825.76 | 825.855 | 0.1 | 0.005 | -0.095 |
| dy52 | 825.83 | 825.771 | 825.816 | 0.059 | 0.014 | -0.045 |
| dy53 | 825.78 | 825.772 | 825.798 | 0.008 | -0.018 | -0.026 |
| dy54 | 825.788 | 825.798 | 825.796 | -0.01 | -0.008 | 0.002 |
| dy55 | 825.629 | 825.601 | 825.625 | 0.028 | 0.004 | -0.024 |
| dy56 | 825.517 | 825.475 | 825.513 | 0.042 | 0.004 | -0.038 |
| dy57 | 825.393 | 825.31 | 825.48 | 0.083 | -0.087 | -0.17 |
| dy58 | 825.296 | 825.271 | 825.341 | 0.025 | -0.045 | -0.07 |
| dy59 | 825.25 | 825.272 | 825.269 | -0.022 | -0.019 | 0.003 |
| dy60 | 825.219 | 825.229 | 825.216 | -0.01 | 0.003 | 0.013 |
| dy61 | 825.226 | 825.151 | 825.271 | 0.075 | -0.045 | -0.12 |
| dy62 | 848.895 | 848.884 | 848.93 | 0.011 | -0.035 | -0.046 |
| dy63 | 848.936 | 848.912 | 848.991 | 0.024 | -0.055 | -0.079 |
| dy64 | 848.894 | 848.842 | 848.891 | 0.052 | 0.003 | -0.049 |
| dy65 | 848.91 | 848.828 | 848.892 | 0.082 | 0.018 | -0.064 |
| dy66 | 848.992 | 848.931 | 849.01 | 0.061 | -0.018 | -0.079 |
| dy67 | 848.991 | 848.951 | 849.002 | 0.04 | -0.011 | -0.051 |
| dy68 | 849.005 | 848.949 | 848.957 | 0.056 | 0.048 | -0.008 |
| dy69 | 848.728 | 848.724 | 848.744 | 0.004 | -0.016 | -0.02 |
| dy70 | 865.068 | 865.088 | 865.03 | -0.02 | 0.038 | 0.058 |
| dy71 | 865.045 | 865.069 | 865.024 | -0.024 | 0.021 | 0.045 |
| dy72 | 865.053 | 865.075 | 865.042 | -0.022 | 0.011 | 0.033 |
| dy73 | 865.037 | 865.042 | 865.012 | -0.005 | 0.025 | 0.03 |
| dy74 | 865.039 | 865.065 | 865.035 | -0.026 | 0.004 | 0.03 |
| dy75 | 865.025 | 865.024 | 865.003 | 0.001 | 0.022 | 0.021 |
| dy76 | 864.992 | 865.04 | 864.995 | -0.048 | -0.003 | 0.045 |
| dy77 | 865.024 | 865.05 | 865.012 | -0.026 | 0.012 | 0.038 |
| dy78 | 865.013 | 865.025 | 865.099 | -0.012 | -0.086 | -0.074 |
| dy79 | 865.034 | 865.026 | 865.018 | 0.008 | 0.016 | 0.008 |
| dy80 | 865.025 | 865.044 | 865.031 | -0.019 | -0.006 | 0.013 |
| dy81 | 865.053 | 865.068 | 865.064 | -0.015 | -0.011 | 0.004 |
| dy82 | 865.755 | 865.741 | 865.762 | 0.014 | -0.007 | -0.021 |
| dy83 | 865.752 | 865.789 | 865.773 | -0.037 | -0.021 | 0.016 |
| dy84 | 865.766 | 865.765 | 865.731 | 0.001 | 0.035 | 0.034 |
| dy85 | 865.765 | 865.776 | 865.73 | -0.011 | 0.035 | 0.046 |
| dy86 | 865.768 | 865.772 | 865.764 | -0.004 | 0.004 | 0.008 |
| dy87 | 865.767 | 865.735 | 865.762 | 0.032 | 0.005 | -0.027 |
| dy88 | 865.781 | 865.79 | 865.792 | -0.009 | -0.011 | -0.002 |
| dy89 | 865.774 | 865.765 | 865.741 | 0.009 | 0.033 | 0.024 |
| dy90 | 865.759 | 865.705 | 865.71 | 0.054 | 0.049 | -0.005 |
| dy91 | 865.773 | 865.783 | 865.761 | -0.01 | 0.012 | 0.022 |
| dy92 | 865.781 | 865.793 | 865.767 | -0.012 | 0.014 | 0.026 |
| dy93 | 865.734 | 865.724 | 865.732 | 0.01 | 0.002 | -0.008 |
| dy94 | 865.768 | 865.778 | 865.806 | -0.01 | -0.038 | -0.028 |
| dy95 | 866.039 | 866.062 | 866.043 | -0.023 | -0.004 | 0.019 |
| dy96 | 866.354 | 866.388 | 866.343 | -0.034 | 0.011 | 0.045 |
| dy97 | 866.34 | 866.203 | 866.362 | 0.137 | -0.022 | -0.159 |
| dy98 | 866.356 | 866.358 | 866.372 | -0.002 | -0.016 | -0.014 |
| dy99 | 866.358 | 866.335 | 866.353 | 0.023 | 0.005 | -0.018 |
| dy100 | 866.353 | 866.337 | 866.323 | 0.016 | 0.03 | 0.014 |
| dy101 | 866.302 | 866.3 | 866.333 | 0.002 | -0.031 | -0.033 |
| dy102 | 866.02 | 866.01 | 866.028 | 0.01 | -0.008 | -0.018 |
6.2.2 利用原始点云数据通过立体采集检查单点精度
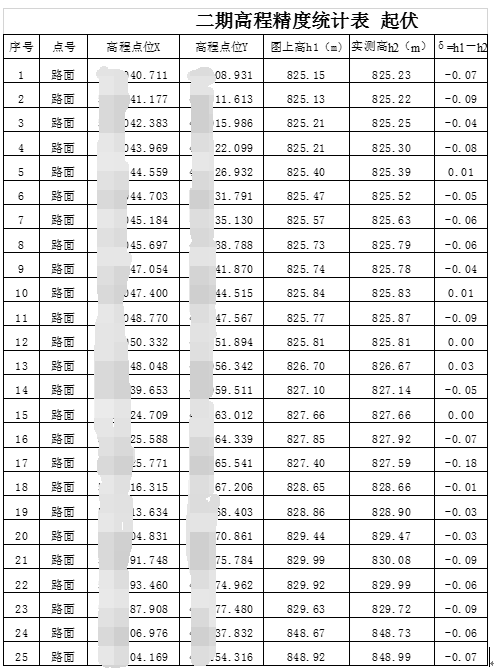
分别将两期点云导入LidarFeature点云矢量化采集软件中,通过恢复立体方式进行检查外业检查点的精度情况,从而降低点云在生成DSM过程中造成的精度损失。两期统计成果如下:
表7 一期高程精度统计表(平地)
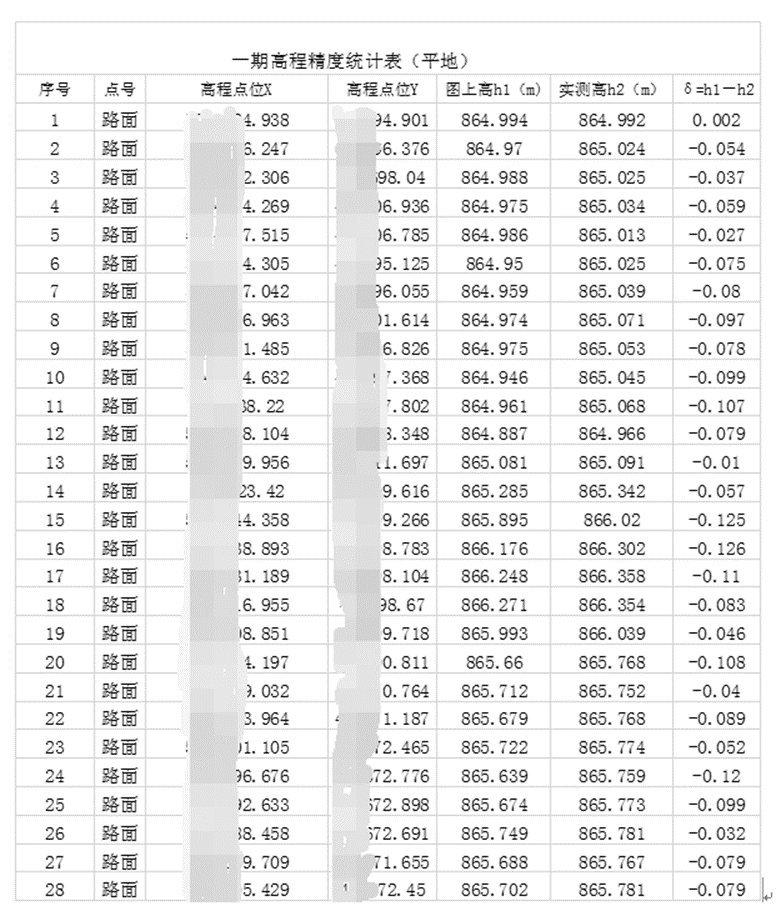
表8 一期高程精度统计表(起伏)
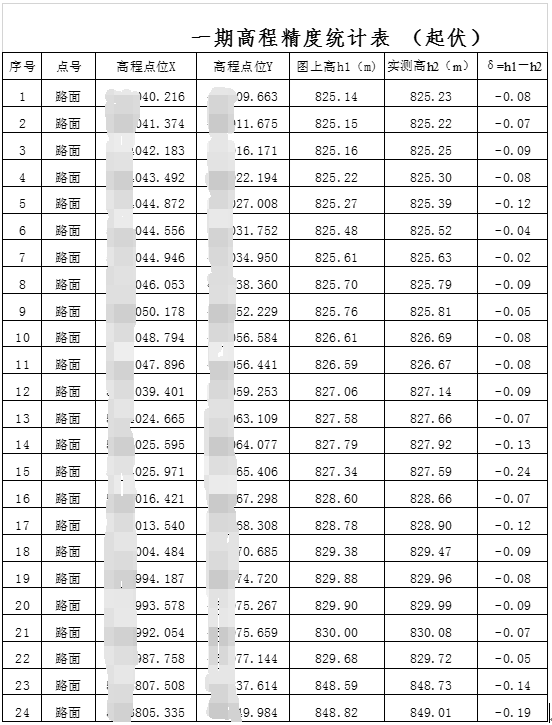
表9 二期高程精度统计表(平地)
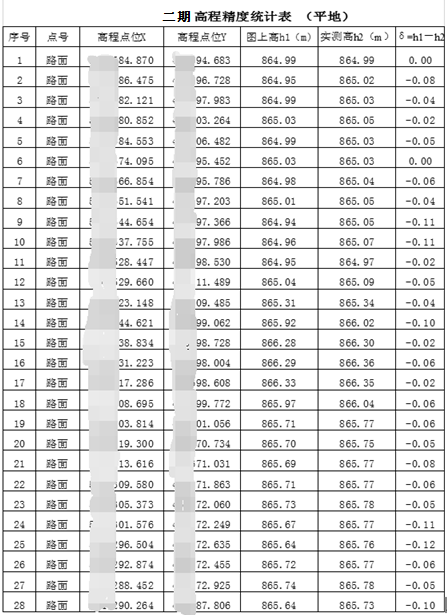
表10 二期高程精度统计表(起伏)
6.2.3 在5级风情况下,风力对设备系统误差的影响
矿区所处位置为草原地貌,其地势平坦,对风力的阻力较小,因此5级风在该地区较为常见。同时露天矿的特殊地形,容易引起坑下的风力乱流,这些都给无人机飞行姿态带来了影响。因此研究风力对设备系统误差的影响非常重要。
通过对同一范围、短时间内的两次机载雷达扫描,从单点、DSM成果、土方量等几个方面验证飞马D200无人机点云精度的可靠性和其系统误差。由于两次飞行时间间隔较近,因此测区内的车辆、机械、人员等可视为无变化,在方量统计中忽略不计。
使用GPS RTK设备连接本单位CORS站作为差分源,在RTK控制手薄的软件中采用控制点测量方法,对外业检查点逐个进行测量,获取准确平面坐标及高程坐标。用来检查航测的绝对高程精度情况。

图32 外业检查点的分布情况
本次外业检查点一共采集了92个点。其中在点云测区范围内的有12个检查点,在测区外边缘的有6个点。其余点不在点云扫描的范围内。
测区范围内部部分外业检查点情况:
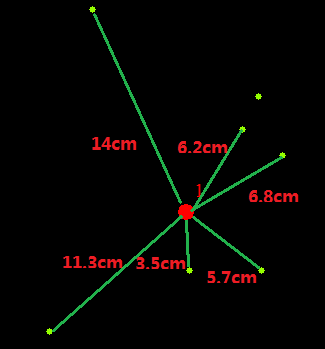
点云第一架次1号点到邻近点的平面距离 DSM及邻近点位相对1号检查点的高差
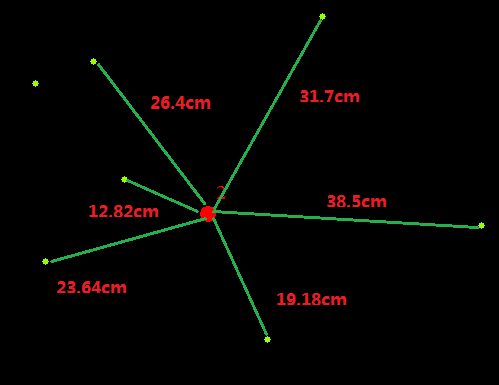
点云第一架次2号点到邻近点的平面距离 DSM及邻近点位相对2号检查点的高差

点云第一架次5号点到邻近点的平面距离 DSM及邻近点位相对5号检查点的高差
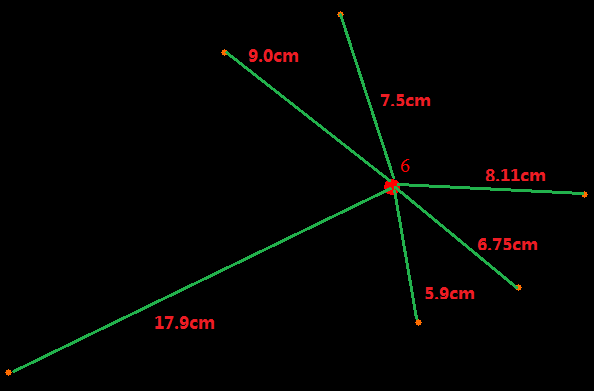
点云第一架次6号点到邻近点的平面距离 DSM及邻近点位相对6号检查点的高差

点云第一架次11号点到邻近点的平面距离 DSM及邻近点位相对11号检查点的高差
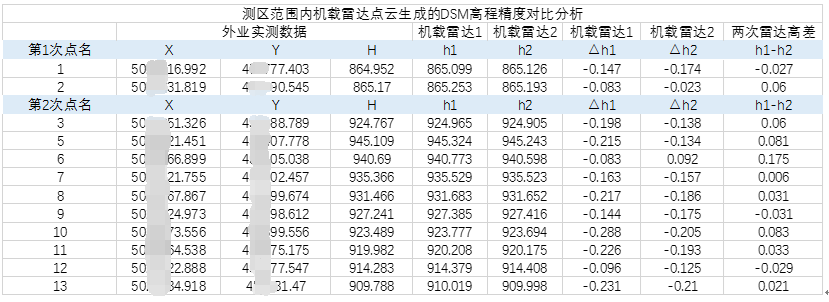
(1)通过两次机载雷达点云生成的DSM,将外业实测点与之对比,检查其对应的高程的绝对精度,详见下表。
表11 机载雷达点云生成的DSM高程精度对比分析表
(2) 基于两次点云生成的DSM,平均间隔50米提取高程点,比较两次点云航测间的高程精度。
首先利用两个架次的激光雷达点云成果生成DSM,然后间隔50米在DSM上采集高程。通过对比点位高程精度分析两次高程相对精度情况。
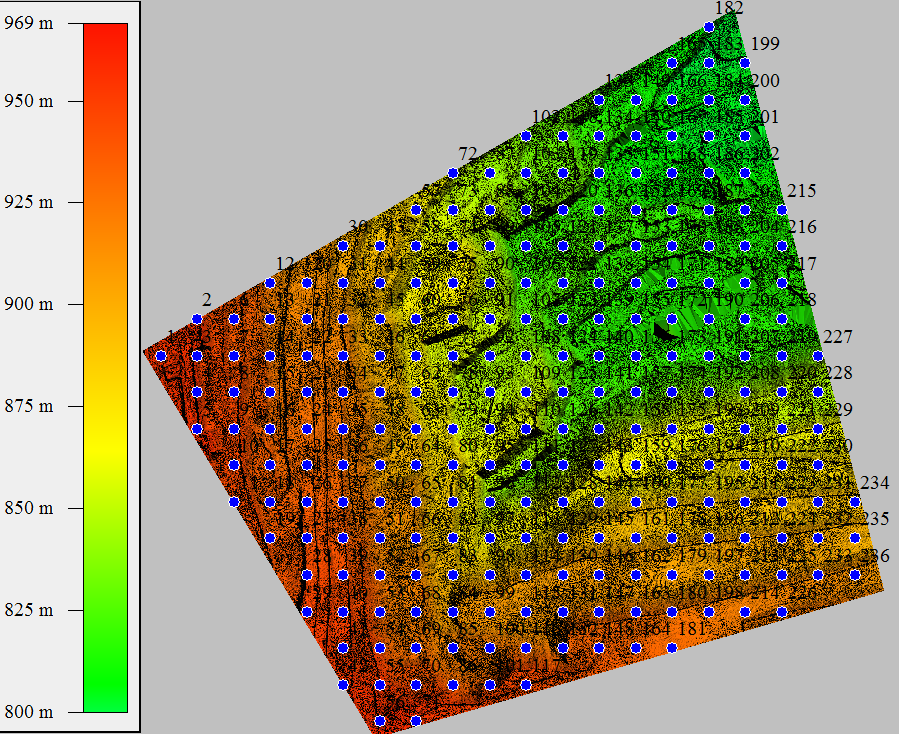
图33 在测区范围内均匀选点
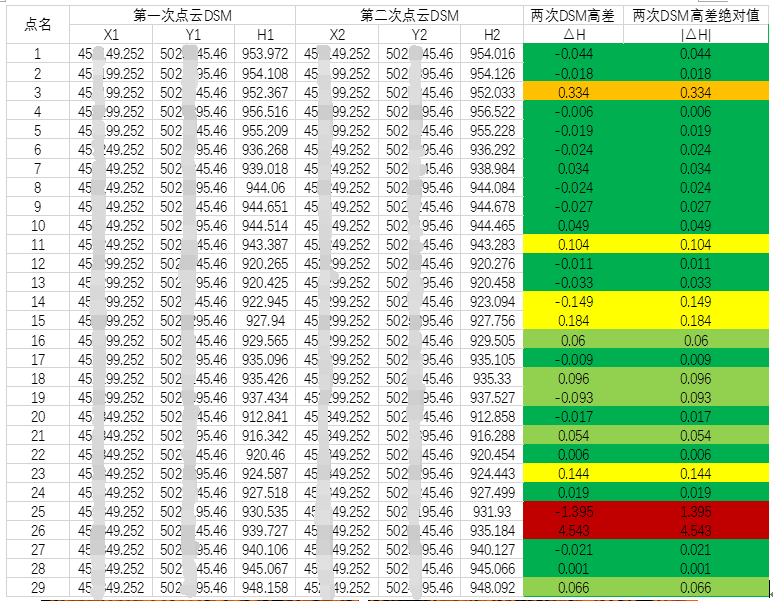
图34 从两架次DSM中平均间隔50米提取的高程点
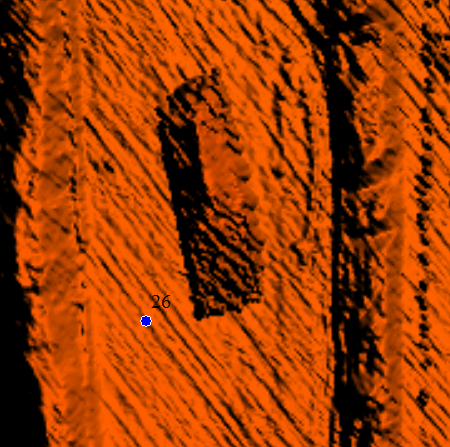
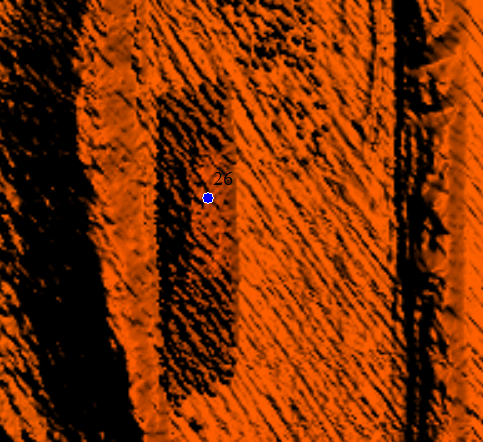
图35 25、26号点因落在移动设备产生的错误(图为26号点)
图36 两期DSM高程点精度统计分布状况图
6.3 飞马Lidar 200精度检查
本次检查报告的数据成果是采用飞马D200型无人机搭载飞马Lidar 200在其标称指标下(距离地面100米)进行的数据采集。
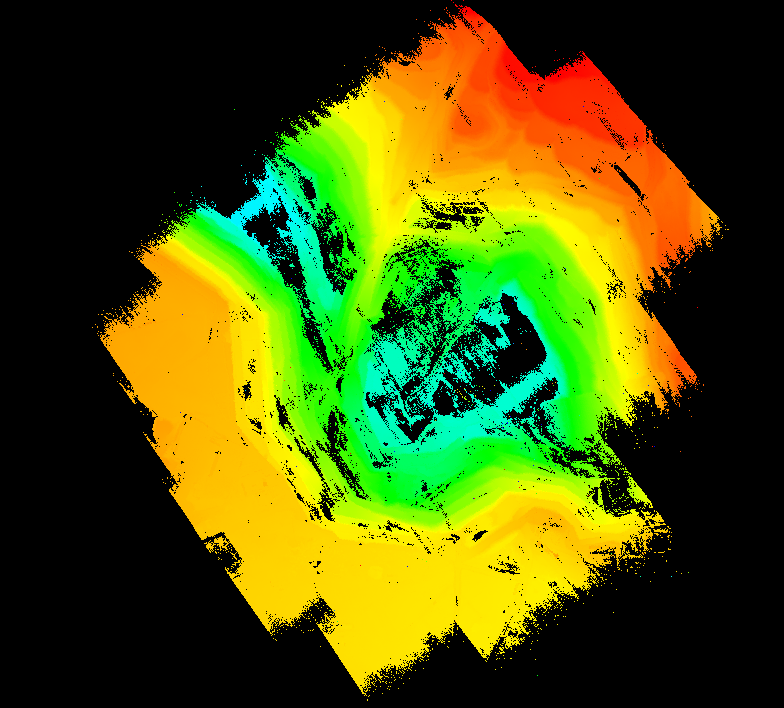
图37 全部成果数据图
利用Lidar 200 在100米高度采集的航带宽度,最宽处约350~400米,最窄处约180~200米。导致航带宽度不同的主要原因是受地形高差起伏的影响。航带越向两端平坦区域越宽,越向中间高差大的位置越窄。
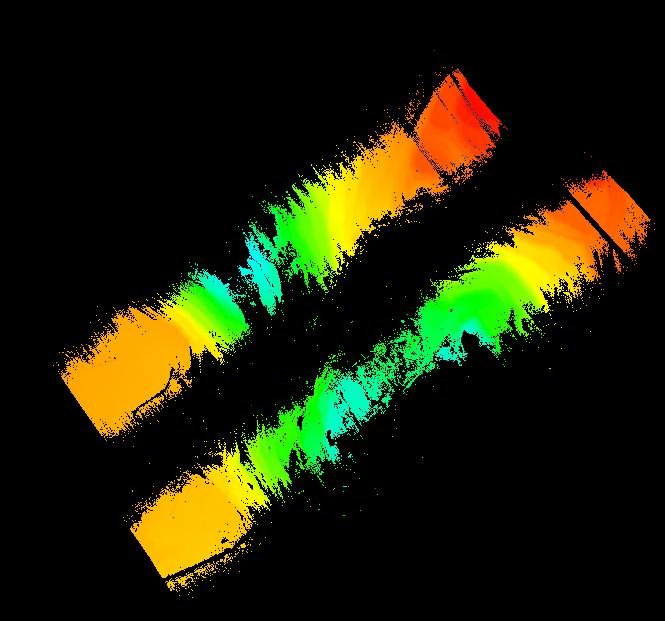
图38 地形起伏对航带宽度影响图
6.3.1 飞马Lidar 200点云(DSM)外符合精度
飞马Lidar 200点云(DSM)高程精度与RTK实测点高程精度对比。高程中误差为0.075厘米。
本次共采集了104个检查点,其中四个为检查站的4个角点。部分检查点分布图如下。
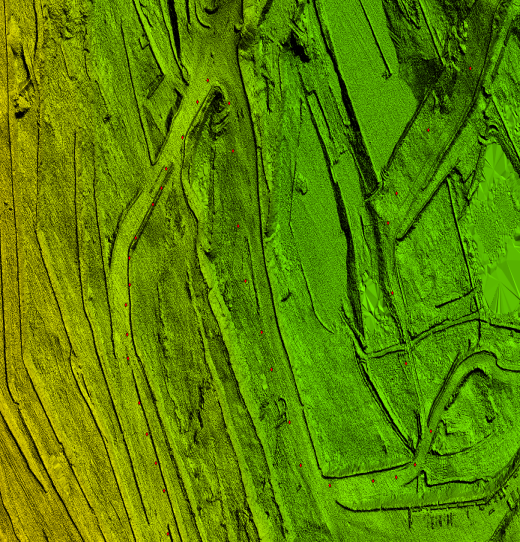
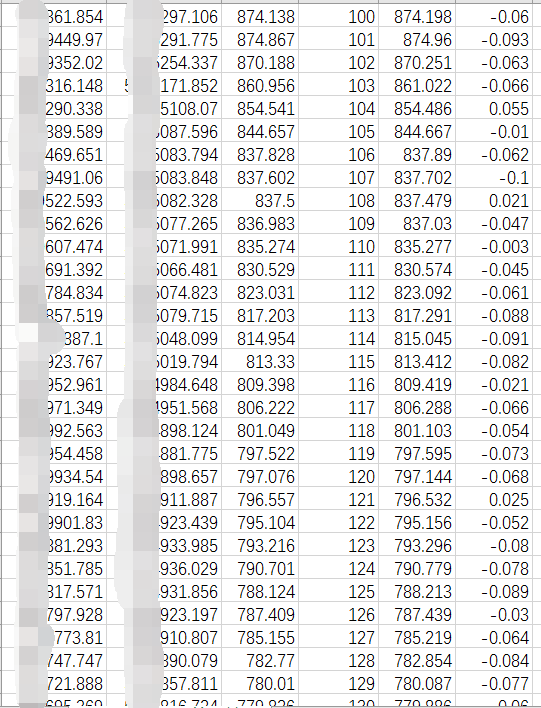
图39 部分点位的精度对比情况图
6.3.2飞马Lidar 200点云内符合精度
飞马Lidar 200点云各航带重叠范围内点云精度对比。
在各航带内分别采集10个航带间重叠间,检验同一架次间各航带重叠范围内的精度情况。共采集了106个点。高程中误差为0.036米。
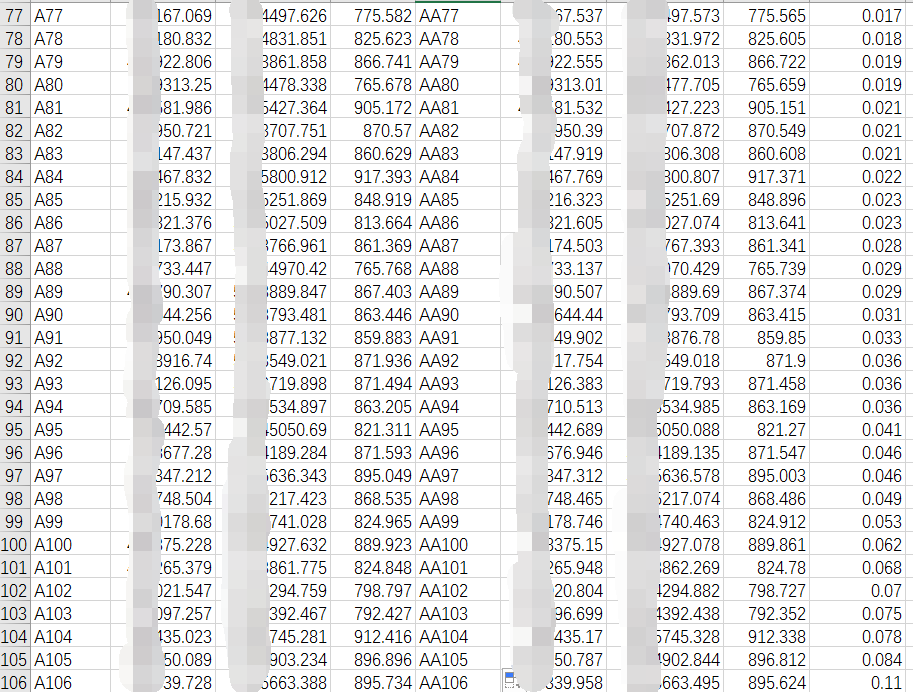
图40 各航带重叠范围内的精度检查(部分数据)
7.精度验证结论
通过飞马Lidar 100 DSM上的单点高程精度检查、利用原始点云数据立体采集单点精度检查、5级风力对设备系统误差的影响分析结果;以及飞马Lidar 200点云外符合精度检查、点云内符合精度检查等成果,证明多旋翼飞马D200无人机挂载单正射相机、机载Lidar获取露天煤矿测区的平面和高程数据满足大比例尺的测图精度。因此多旋翼飞马D200无人机挂载单正射相机、机载Lidar可应用于露天矿土石方量的计算。
四、解决生产问题
矿山测量的首要任务就是要高效、准确、安全的获取矿山开采的高程变化量。为采挖设计、经济算量提供等详实可靠的一手数据。随着我国采挖技术的提高,采挖机械的现代化,矿山开采量的变化也越来越快,如何保证测量数据的及时性、可靠性,给现代矿山测量手段提出了新的要求。
无人机技术的出现,尤其是免像控、免标靶、机载雷达的出现,使得外业数据的采集手段得到了极大的改变,无论从生产效率以及数据的可靠性都得到了显著的提高。飞马多旋翼无人机D200搭载机载Lidar传感器很好的解决了这一问题。
五、创新型应用介绍
LiDAR所具备的最大优点是穿透能力强,其能够穿越树木、杂草等地物的间隙而直达地面,因此其可以获取精确的地形数据,为矿区地形测量的应用提供高精度数据成果。通过本次D200多旋翼无人机搭载雷达对矿区的数据采集可以看出,其有以下几点优势:
1、外业数据获取方面
(1)飞马D200配备高精度GNSS板卡,支持PPK、RTK及其融合作业模式,可实现稀少外业控制点或一定条件(地物特征丰富)下无控制点大比例尺成图,支持高精度IMU获取及精确POS辅助空三,实现免像控应用。众所周知在矿区内布设稳固并且均匀分布的相控点十分困难,飞马D200极大减少无人机航测外业工作以及满足艰险地区数据获取等要求。
(2)无人机管家智航线模块可根据任务区域的地形起伏和影像要求,基于高精度实景三维地形自动生成满足后期处理的最佳飞行方案和航线,并能对超大区域进行任意角度自动分割和航线角度调整,保证后期和处理接边需要。
(3)配备飞马无人机基站模块,该模块可在静态数据观测的同时发送RTK改正数到地面电台,实现与数传链路共用一个电台的最简架构。
(4)D200搭载的机载雷达,是主动式的测量,在天气情况允许时可以进行24小时不间断作业。从而打破数据获取的局限性,得到更多的获取数据的机会。
(5)D200可采用变高飞行,其根据已有的粗略DSM来实时调整飞行高度,保证自身与这种起伏地形之间的相对航高始终保持一致,这就保证了所获取的数据无论是矿山测区高点还是低点,点云的精度和密度一致性。
(6)“智激光”是一款配合飞马无人机激光雷达的一站式数据处理软件,能够基于无人机激光雷达获取的距离、位置、姿态等原始数据生成满足设计精度的点云数据,包括海量点云组织管理、点云数据解算,设备检校,航带平差,海量点云可视化,标准点云输出等功能。
2、内业数据处理方面
(1)D200配备的“无人机管家”专业版软件,满足各种应用需求的航线模式,支持精准三维航线规划、三维实时飞行监控,具备GPS融合解算、控制点量测、空三解算、一键成图、一键导出立体测图,提供DOM、DEM、DSM、标准LiDAR点云等多种数据成果及浏览。
(2)无人机管家专业版支持多达万张影像同时处理,支持快速密集点云、真正射和实景三维成果类型。
(3)无人机管家控制点量测支持人工量测和自动量测,并提供稳健的GPS辅助空三算法,保证极少控制点情况下的成图控制精度,提高无人机大比例尺应用效率。
(4)支持正射和倾斜匹配和空三解算,从容应对影像不规则排列、旋偏角较大、重叠度不规则等情况,并兼容各种相机、地形、天气和环境的影像数据。
3、从未来可扩展性来看
D200作为一机多挂载平台。可以搭载单正射相机、倾斜相机和雷达等多种传感器。其中单正射相机可快速获取区域内的影像信息,了解矿山的开采面积、现场开挖现状等信息;倾斜相机能够更好的获取矿山内建筑、机械的侧面纹理信息,通过大量影像信息能更够得到更高精度的位置信息。而激光雷达作为目前最为先进、高效、准确的数据获取手段,为矿区内两期土方量的验收等,提供重要的技术手段。
通过对此次飞行区域一期3.5平方公里,二期1.19平方公里的点云采集。得到如下表的效率统计情况。
| 处理过程 | 耗时(min) | 备注 |
| 点云预处理(轨迹解算、点云解算) | 60min | |
| 点云投影变换 | 20min | |
| 点云后处理(去噪) | 20min | |
| 点云自动滤波分类 | 100min | |
| 人工编辑 | 20min | 测区地物较少,编辑量小 |
| DEM输出(10cm) | 30min | |
| 共计 | 250min(约4h) |
综上所述,具备免像控、免标靶、高精度、多挂载的D200多旋翼无人机在矿山测量应用中将减轻外业测量人员作业难度、提高工作效率、保障生产安全。使得测绘工程师们有更多的时间和精力去专注于行业测绘。
六、项目特点及优势总结
1、本案例在内蒙古某露天煤矿选择面积1.19平方公里和3.5平方公里的两个区域作为研究对象,测区内地形起伏变化较大,具有露天矿区的一般代表性。该地区属典型的半干旱大陆性气候,冬季漫长寒冷,夏季短促凉爽。年平均气温0.9℃,极端最高气温39.3℃,极端最低气温-39.4℃。飞马D200的工作温度为零下20℃至零上50℃,极大的满足该地区极端的天气条件。
2、矿区土石方量的计算需要测区的高程信息或DEM数据,全站仪、RTK等传统的测量手段获取的高程数据,不论通过怎样的算法得到的内插高程数据,其精度无法与Lidar获取的大量的点云数据精度相比。
3、矿区内地形起伏变化较大,正常航线规划飞行时,由于航高实时发生变化,则不能保证海拔较低地方的点云密度和点云精度。飞马D200可采用变高飞行,保证自身与这种起伏地形之间的相对航高始终保持一致,因此保证了所获取的数据无论是测区高点还是低点,点云的精度和密度都具有一致性。
4、飞马无人机管家智航线模块根据不同的传感器可适配不同的作业应用模式,可生成精准地形跟随飞行方案和航线。由于要与起伏地形相对航高保持保一致,这种全自动航线设计大大减轻了外业飞手工作和难度。
5、飞马D200挂载Lidar传感器,可24小时全天候工作。并且全自动航线设计以及免像控、20公里长航程、智能电池较其他无人机使用的锂电池性能上优势明显。
6、飞马D200作为一机多挂载平台。可以搭载单正射相机、倾斜相机和雷达等多种传感器,单架次飞行获得的数据便可制作DEM、DSM;三维建模;点云数据,大大提高外业工作效率。
