投稿单位:
青海省地矿测绘院
青海省高原测绘地理信息新技术重点实验室
投稿人:
马立华 张小宏 陈丰田
2018年12月1日
摘要:通过实际生产总结出一种无人机倾斜摄影测量数据采集新方法,解决管道类实景三维数字模型数据采集难点问题,并提出作业过程中应注意的步骤,具有一定的实用意义。
一、项目背景
随着西部大开发和天然气等新型清洁能源开发利用力度的加大,青海省境内油气管道数量日益剧增,与此同时,近几年我省经济建设也取得了快速发展,土地利用空间不足导致非法侵占、挤压管道安全空间的问题凸显。省安全监督管理局管理着全省大量管网和设备,违章建筑严重影响了燃气管网及设施的安全运行,加之全国各种油气管道安全事故的频发,油气管道安全运行和监管时不我待;同时我省燃气信息化建设与外地相比还存在相当大的差距,以往资料都是纸质的,坐标系统不一致,标准不统一,格式不统一,不完整,无法整体展示输油(气)输送管道基本走向分布和相应属性信息;信息系统机制薄弱,缺少一个规范的燃气管线信息统一管理平台,积累了大量数据但是尚不注重数据的整理和挖掘;体现在:生产的安全管理效率低,对事故的应急处理能力差,资产利用率低,输配和管理成本高。燃气管道安全监测涉及内容极其复杂,燃气管道地面、地下线路并存,涵盖多种地貌特征,新旧线路年代跨度较长,管理对象分布区域广、情况复杂、数量巨大、联系紧密、相互影响大、管理关系复杂。
基于以上原因,建设油气管道在线监控系统体系,充分应用信息化、智能化技术,加强燃气安全管理能力,在燃气泄漏检测、管线防腐、管线施工、管线巡检、管线应急抢修等各个环节,提供全省统一、精准的位置参考基准,直观的关系图,为领导决策提供一个动态的图件,改善燃气安全管理信息化的能力已迫在眉睫。
经国内公开招标,受青海省安全生产监督管理局的委托, 华睿诚项目管理有限公司青海分公司对“青海省油气输送管道电子分布图及在线监控系统项目”进行国内公开招标(华睿诚公招(服务)2017-021,项目总金额400万元),青海省地矿测绘院中标该项目,项目通过实践总结出利用飞马D1000获取管道类实景三维数字建模数据的新方法,圆满完成任务。
二、技术路线(三维数据获取部分)
本项目采用倾斜摄影的技术手段来获取地物、地表的三维数据信息,用全景相机进行360度影像获取;对获取的原始数据经过软件处理,为本次油气输送管道电子分布系统提供基础数据。
倾斜摄影测量技术以大范围、高精度、高清晰的方式全面感知复杂场景的全方位信息,系统通过高效的数据采集设备及专业的数据处理方法,产生的数据成果能直观反映地物的外观、位置、高度等信息,成果能真实有效地为精度测绘提供保证。
全景影像数据是通过360度全自动相机云台结合超大广角镜头相机进行全方位影像获取,在整个油气管线的各个场站及关键点进行无死角摆站拍摄,集成到系统平台中,能够给用户带来身临其境的效果。技术流程见图1。
地面控制点
倾斜摄影数据采集
垂直影像
倾斜影像
空中三角测量
自动密集匹配DSM
构建TIN模型、生成白模
3D纹理映射
实景三维数字模型
图1实景三维数字模型生产工艺流程
三、油气管道精细化实景三维建模难点
3.1油气管道特点
本项目中涉及的油气管道是指分布在油气管理单位场站内用于输送油气资源的专业管道,因用途各不相同分为分输站、热泵站、阀室、阴保间、计量间等,其结构复杂、分布密集、形状多样。
3.2难点分析
1)场站内油气管道布设贴近地面,常规无人机倾斜摄影测量数据采集时由于高度和角度的限制,无法采集到贴近地面部分的数据。数据处理缺乏支撑,出现大量拉花、空洞,严重的甚至无法构建空三加密网。
2)各种罐体高度、形状各有不同,间距窄小,常规无人机倾斜摄影测量数据采集时相互重叠遮挡产生视角盲区。数据处理时自动联结为一个整体,难以区分。
3)常规用于倾斜摄影测量的无人机出于安全考虑有一定的最低安全飞行高度,一般都在50—100m之间,对于管道类实景三维数字建模数据采集而言,细节丢失严重。
综上原因,管道类实景三维数字模型采用常规手段采集数据获取的模型细节模糊,纹理质量粗糙,无法达到应用的目的,必须改进数据采集方法来解决问题。常规手段获取的管道类实景三维数字模型效果示例见图2。(本项目中常规方法采用的设备为飞马D200)
图2常规倾斜摄影测量
四、数据获取
4.1数据采集设备
采集设备选用飞马D1000,该设备由飞行器、遥控器、云台相机以及配套设施组成。机身配备先进的视觉定位及障碍物感知系统,在更大范围内及时探测并自主躲避障碍物,并增加降落保护功能,能实现指点飞行与智能跟随等功能。返航功能使飞行器失去遥控信号或电量不足时自动返航并降落。
飞马D1000配备全新的24mm(35mm格式等效)低畸变广角相机、高精度防抖云台相机可稳定拍摄2000万像素照片,机械快门和自动对焦增强了飞行航拍的成像效果。最大水平飞行速度为20米/秒,最大飞行时间30分钟。
4.2采集方法
1)单环绕法
数据采集区域范围半径和高度均小于15米,采用单环绕法,环绕飞行采用飞马D1000中的“兴趣点环绕”功能,环绕半径5-15米,镜头拍摄角度设置为60-80度。环绕中心为数据采集区域中心点,曝光时间设置为1秒,模式为自动。飞行高度高于被摄物体最高点5-10米,单环绕航线示意图及场景(局部)见图3。
此处环绕半径和拍摄角度的选取以单像幅同时覆盖环绕中心和采集区域最远端为宜。


数据采集区域范围半径小于15米,高度大于15米,采用同心柱式环绕法,同心柱式环绕航线示意图及场景见图4。
同心柱式环绕飞行采用飞马D1000中的“兴趣点环绕”功能,环绕中心为数据采集区域中心点,曝光时间设置为1秒,模式为自动。顶层环绕航线飞行高度高于被摄物体最高点5-10米,环绕半径5-15米,镜头拍摄角度设置为60-80度,环绕半径和拍摄角度的选取以单像幅覆盖环绕中心即可。底层环绕航线的环绕半径和拍摄角度与顶层环绕航线采取一致,同时兼顾以单像幅覆盖数据采集区域最远端。中间环绕航线以距底层航线高度间距10-15米划分,但要保证各环绕航线高度间距小于15米,环绕半径和拍摄角度与顶层环绕航线采取一致。


图4同心柱式环绕航线示意图及场景(局部)
数据采集区域范围半径在15米—40米时,高度小于15米,采用同心锥式环绕法,同心锥式环绕航线示意图及场景(局部)见图5。
同心锥式环绕飞行采用飞马D1000中的“兴趣点环绕”功能,环绕中心为数据采集区域中心点,曝光时间设置为1秒,模式为自动。内层环绕航线飞行高度高于被摄物体最高点5-10米,镜头拍摄角度设置为60-80度,环绕半径和拍摄角度的选取以单像幅覆盖环绕中心即可。外层环绕航线的飞行高度高于被摄物体最高点5-10米,环绕半径和拍摄角度与顶层环绕航线采取一致,同时兼顾以单像幅覆盖数据采集区域最远端。中间环绕航线以距底层航线高度间距10-15米划分,但要保证各环绕航线高度间距小于15米,环绕半径和拍摄角度与顶层环绕航线采取一致。

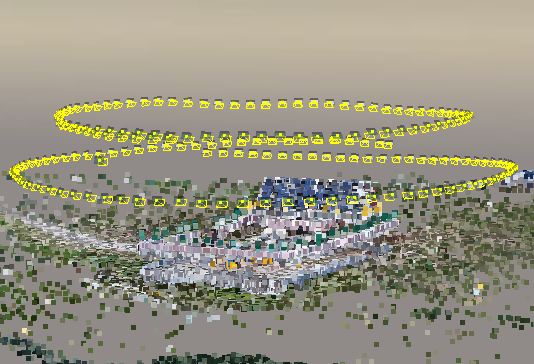
图5同心锥式环绕航线示意图及场景(局部)
4)多方法融合
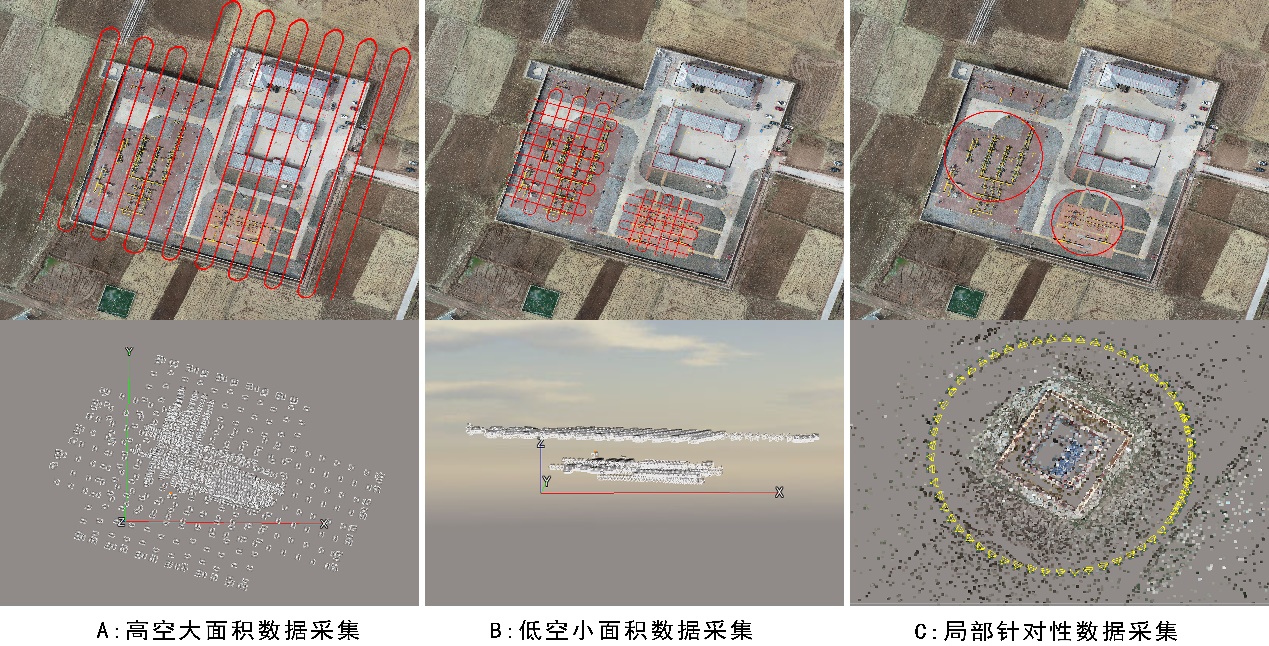 对于多种建筑和管道兼有的场站类数据采集需要根据分布特点综合应用各种方法。整体布局应采用自动智能航线(常规无人机倾斜设备均配置),使之覆盖全区,管道分布区域综合应用单环绕法、同心柱式环绕法、同心锥式环绕法采集相应数据,最后将多元数据融合即得到场站实景三维数字模型。多方法融合航线示意图及场景见图6。
对于多种建筑和管道兼有的场站类数据采集需要根据分布特点综合应用各种方法。整体布局应采用自动智能航线(常规无人机倾斜设备均配置),使之覆盖全区,管道分布区域综合应用单环绕法、同心柱式环绕法、同心锥式环绕法采集相应数据,最后将多元数据融合即得到场站实景三维数字模型。多方法融合航线示意图及场景见图6。
4.3注意事项
对于错综复杂的管道区域,无人机在指定航线飞行时必须开启定时拍照功能,定时拍照根据飞行速度的不同调至相应的拍照间隔时间;在手动补拍飞行时要保证匀速飞行,相邻航带不得少于3条且保证旁向重叠度大于65%,航向重叠大于80%;同一区域内高层航带与低层航带之间的航高差不大于15m。
在场站内的特殊区域进行环绕法进行补拍,场站的手动直线法与管道区域的手动环绕法相结合补拍时,直线航带与环绕圈之间的航高差不得大于15米;同心圆高层环绕圈与低层环绕圈之间的航高差不得大于15米;环绕圈与环绕圈重叠的航高必须大于小圆半径的1/3;在确保绝对安全的前提下,环绕圈尽可能小。
五、内业数据处理
采用以上不同的采集方法获取的影像数据,如何在Smart3DCaptur中进行融合处理也是本次探索的关键。
5.1空三解算
在数据处理流程上,首先把各种方式采集到的数据进行分类并导入到后处理软件,并且保持文件夹的路径为非中文路径。在工程准备完成后进行空三解算,软件会对图片进行大量特征点的计算提取,对获取的特征点采用多视角匹配同名点,然后反向解算出每张图片的空间位置还有图片的姿态角度,从而确定图片间的关系。空三加密完成后,在Smart3D里面查看到整个航带的飞行情况、解算出空三点的位置密度、每张图片的相对位置还有图片所覆盖的范围方位角等信息。
空三加密并不是每次都可以正确解算出来,这涉及航片的重叠度、清晰度和角度等问题,解算出来的空三加密点可以在Smart3D工程软件里查看,也可以放到其它软件里查看。空三加密完成后必须查看软件解算出来的空三加密点是否漂移、漂移的区域是边缘还是中心、整个空三加密点的相对位置是否正确等。如果空三加密点相对位置不正确或者漂移,并且漂移的区域是中心地段和重要区域,就必须重新再进行一次空三加密。多次空三加密都未成功,可以删除一些质量较差、姿态较差的航片再次尝试。如图7为空三解算工程
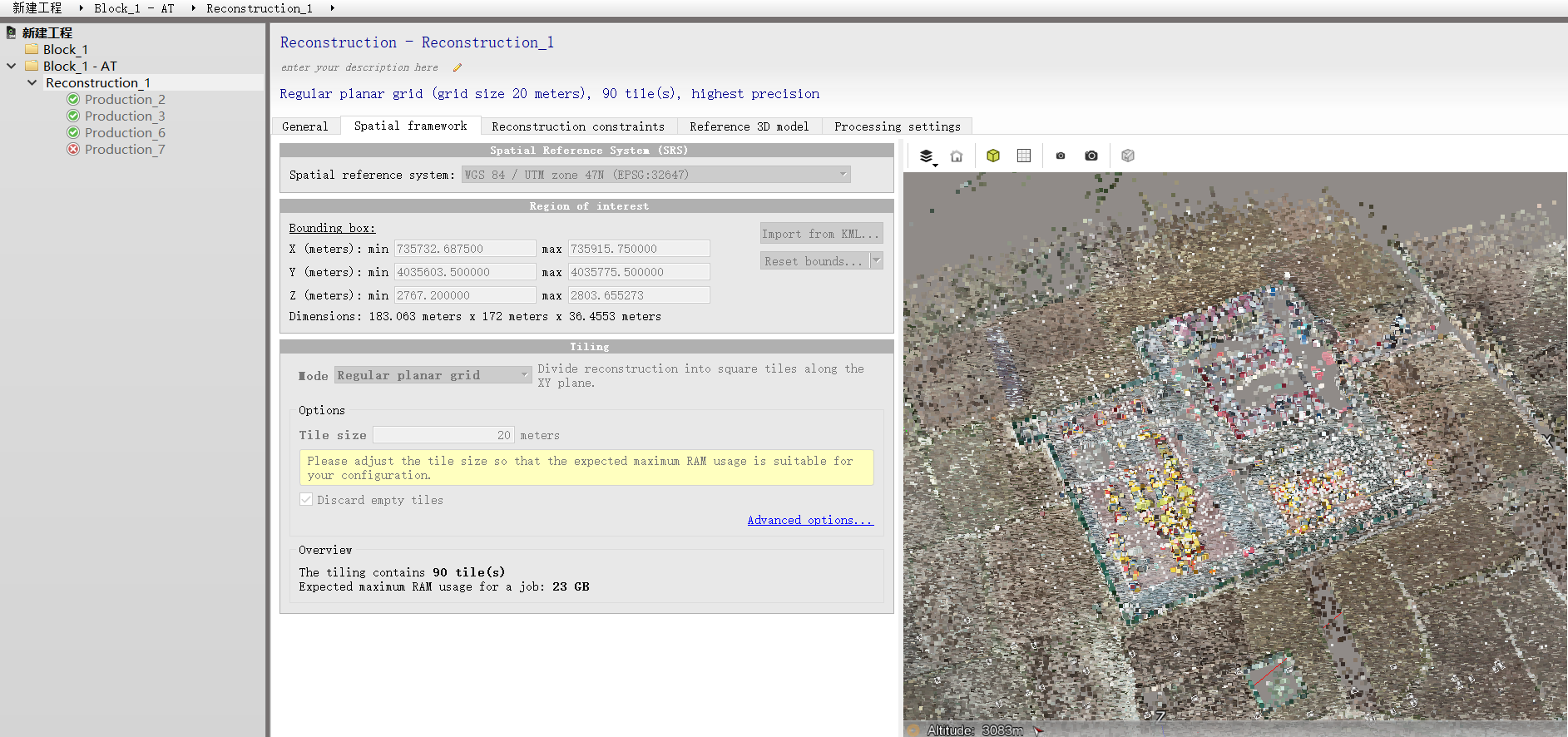
图7:空三解算工程
多个架次的不同高度的航片融合在一起时行实景三维模型建设时,空三加密就有可能不能把所有的航片计算出来,或者是计算出来空三加密点漂移等情况。这个时候就需首先创建多个Block,把不同航片导入不同的Block里面进行空三加密。空三加密完成后,把解算出来的航片加载进入,然后输入分开算好的航片位置与姿态信息,融合起来进行空三加密。这样来进行空三加密就可以解决不同架次、不同航高、不同数据源空三加密困难的问题。
1) 加入控制点
空三加密后开始加入控制点。在空三加密之后加入控制点还要再进行一次空三加密,而控制点也可以在空三加密前就加入Block里面,这样就无需再一次空三加密。之所以选择空三加密后加入控制点,是因为这样两次空三加密所需要的时间要比加入控制点后空三加密的时间还要短,并且还可以通过空三加密出来的航带信息,更快找到控制点在哪些图片上,减少了刺控制点的时间。Smart3D提供了很多个坐标系,这里这们以CGCS2000为准。
2) 模型建立贴图
空三加密、控制点刺完之后就开始模型建立贴图。软件通过空三加密点计算出不规则三角网TIN,并且生成白模的三维模型,再通过三维模型形状位置从航片里面选取最合适的进行纹理的贴合,最后输出纹理逼真的实景三维模型。将模型切分为多块来建立,这样可以把Smart3D计算不好的或者是水域计算出来有空洞的部分导出到第三方软件里面修改编辑加工,这样分块就可以减少导出的数据量并便于融合数据、更新数据。导入第三方软件,就必须重新用Smart3D导出OBJ格式,然后再到如3DMAX、CoModeler等软件里面编辑修改加工,修改加工完成后再导入Smart3D里重新融合输出便可以完成一个实景三维的项目建设。如图8为多源数据融合后的建模效果,模型层次分明,微地貌精细度处理效果良好。
图8:多源数据融合后的建模效果
六、工作照片



七、结束语
无人机倾斜摄影及实景三维建模技术已得以广泛应用,但由于该技术采用自动化建模方式,对于细节方面的解算还存在着一些不足,是软件无法解决的问题,本质是对数据源的高标准要求。比如:建筑物稠密区、环境复杂的工厂、附着于地面的微地貌等,要想提高精细度,就需要在数据源获取方式上采用特殊的方法。因此,我们就需要用于多种采集方法相结合的模式,同时必要时将三维激光扫描仪获取的点云数据做为高精度拟合数据源,最终可以生产出成高精细的实景三维模型。
针对“高精细度、高效率、低成本”的三维模型生产方法是本次探索与应用的最终目的,它将在我们今后开展数字矿山、智能城市等项目中得以广泛地推广和应用。
依托该项目的实施,成功获取立项青海省重点研发与转化计划项目(2018-SF-138),项目总投资2000多万元。
