- 项目背景及意义
随着我国经济的快速发展,国家对电力能源提出了巨大需求。截至2018年底,国家电网公司110(66)KV以上线路回路长度已达99.3万公里,且仍在以每年5%的速度增长。在巡检人员短缺和输电精益化管理要求的双重压力下,国家电网公司大力推广无人机代替人工进行输电线路巡检。
随着架空线路规模的不断扩大,对巡检的效率、质量、安全等方面的要求越来越高,传统人工巡检作业的劣势越来越明显,基于这样的背景,现代化电网建设与发展的需求呼唤着先进、科学、高效的电力巡线方式。
无人机激光雷达技术已被愈发广泛地应用于电力行业,服务电力输电线路三维重建与沿线地表形态恢复、新线路走向选择设计、已有线路巡查检查、线路资产管理、智能电网专业分析等应用,重点关注线路走廊、交叉跨越、导线弧垂、线间距离、杆塔本体、地表附着物等测量对象及其空间关系,相较传统巡线方式、传统测绘手段展现出绝对的能力优势、效率优势和精度优势。
二、项目概况
2020年3月8日,飞马机器人电力事业部接到某电力巡线项目需求,赴项目地区开展作业。项目区输电线路的电压等级分为35KV、110KV、220KV等,线路总长约495公里。部分输电线路位于山区,线路错综复杂、高差达700米,整体作业难度较大。
 项目线路交错复杂
项目线路交错复杂
 项目线路大高差、大跨度
项目线路大高差、大跨度
三、项目效率
该项目共投入2个作业队伍(每队2人),作业历时18天(20200310-20200327),实际项目实施15天。
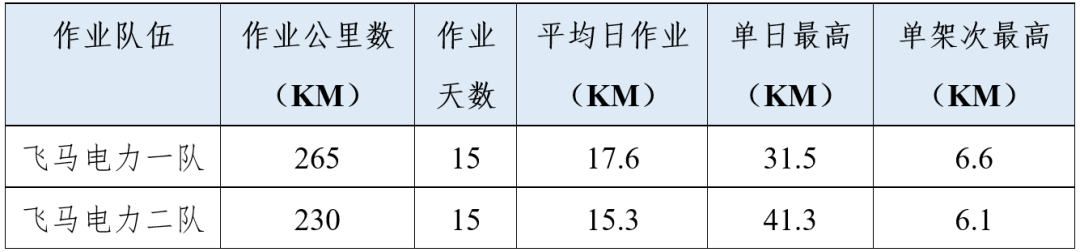
项目作业效率表
四、项目成果
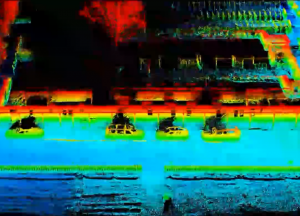
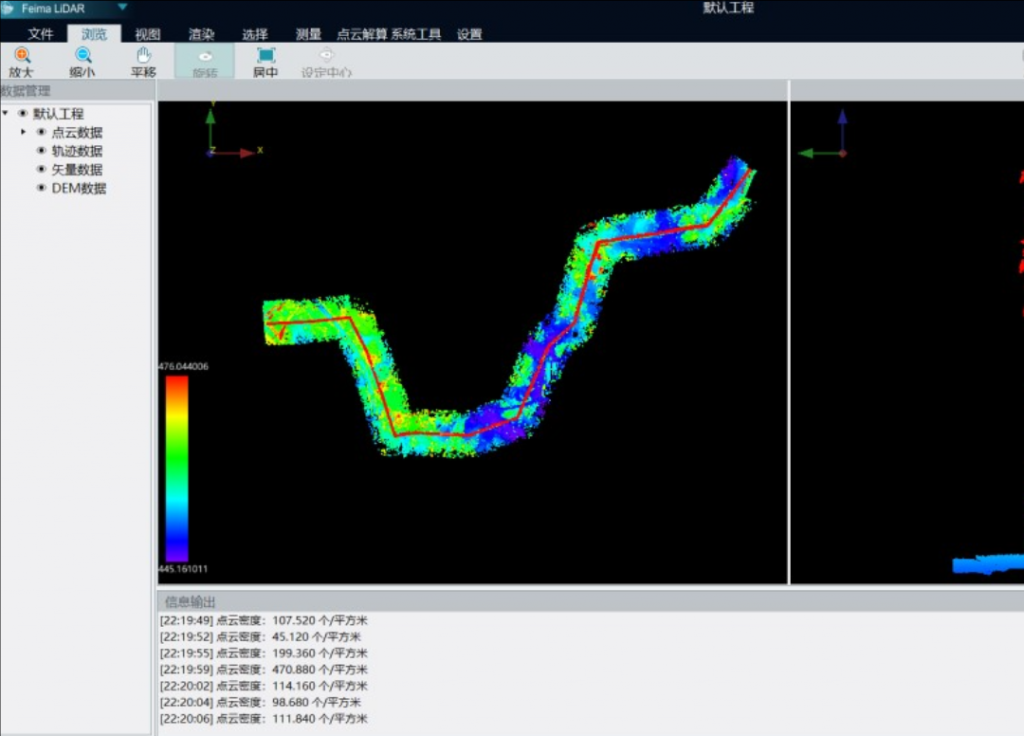
此次项目所获数据整体质量良好,平均点密度优于100p/m²,经无人机管家专业版处理后,线路及杆塔清晰。
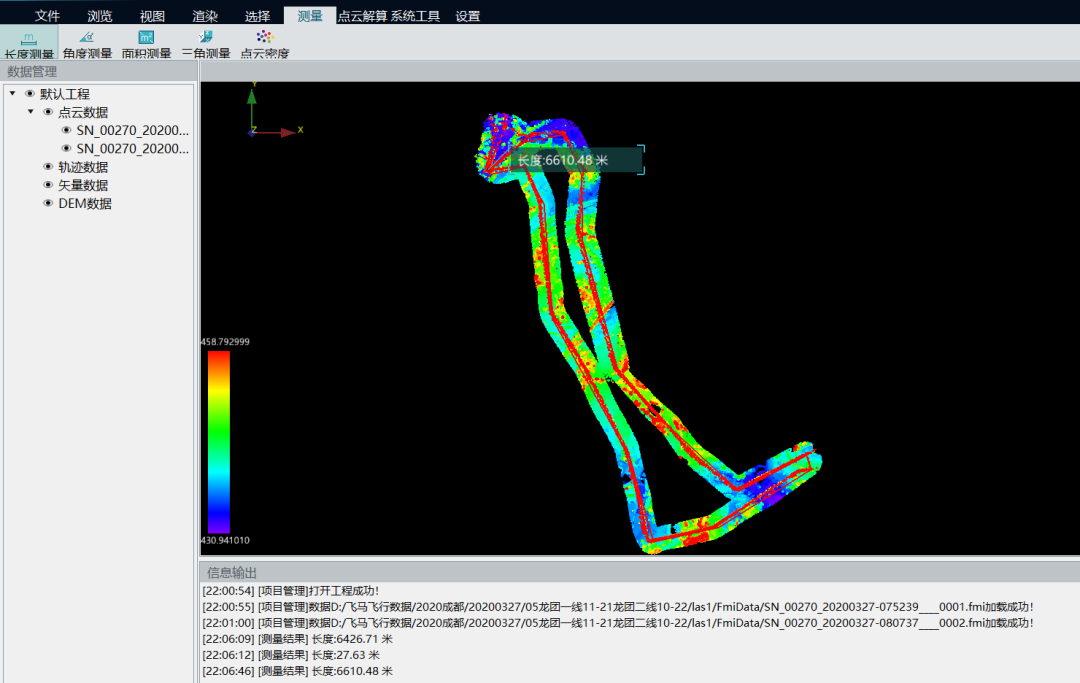 220KV线路(单架次6.6KM)
220KV线路(单架次6.6KM)
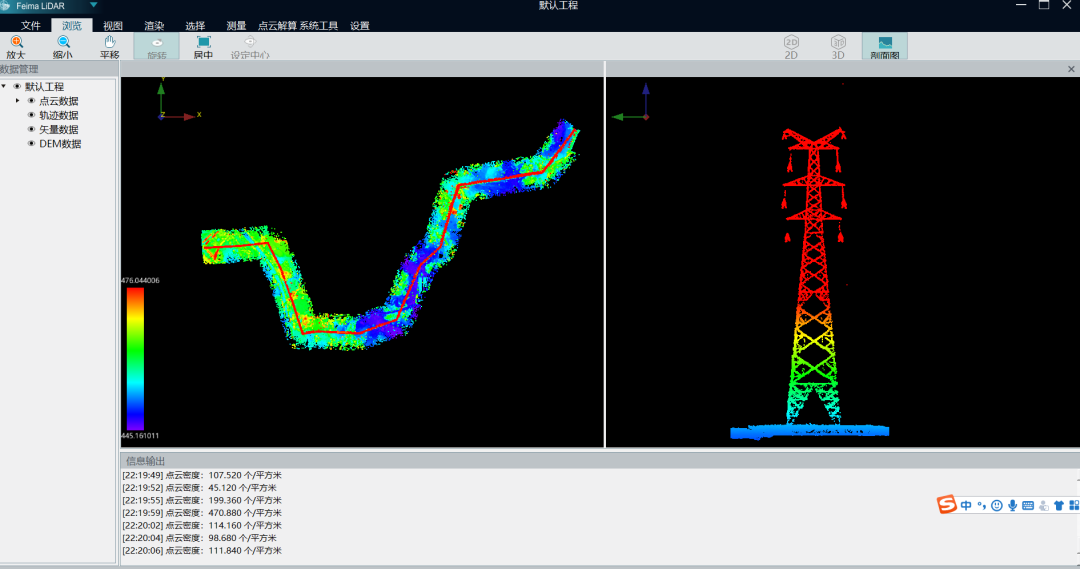 220KV线路(单架次6.4KM)
220KV线路(单架次6.4KM)
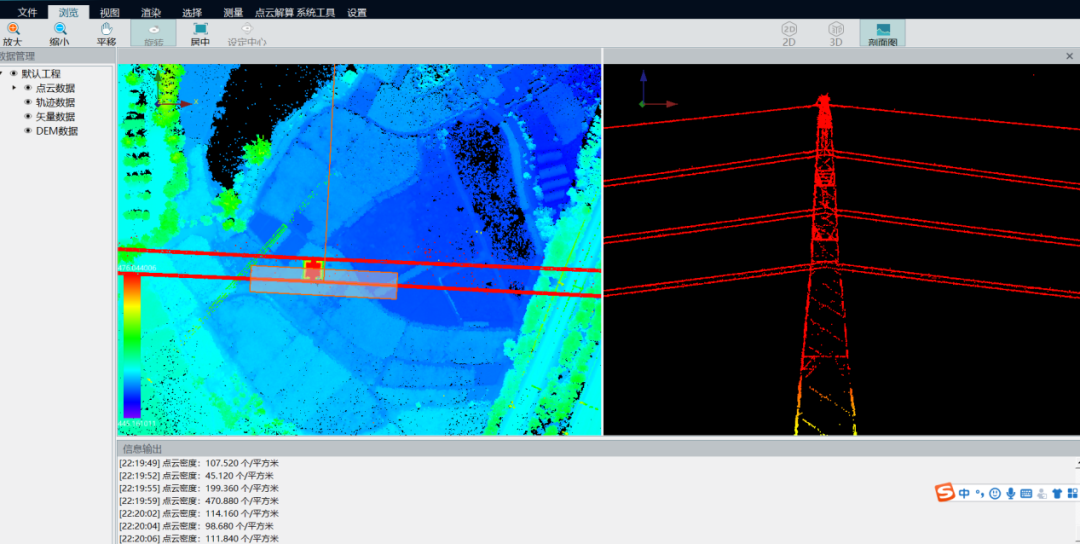 杆塔及电线清晰、平均点密度优于100p/m²
杆塔及电线清晰、平均点密度优于100p/m²
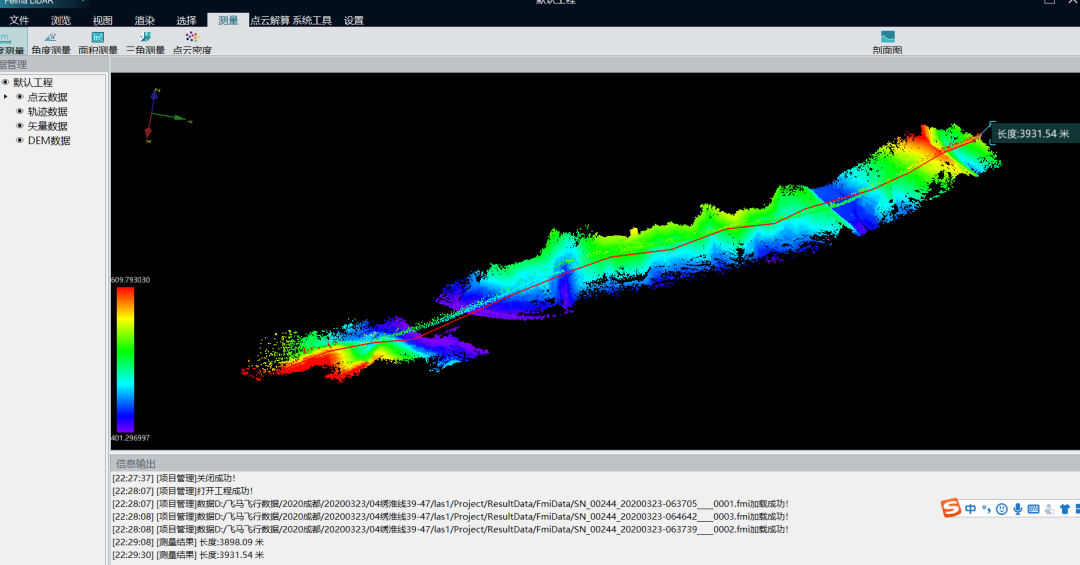 35KV线路(单架次3.9km)
35KV线路(单架次3.9km)
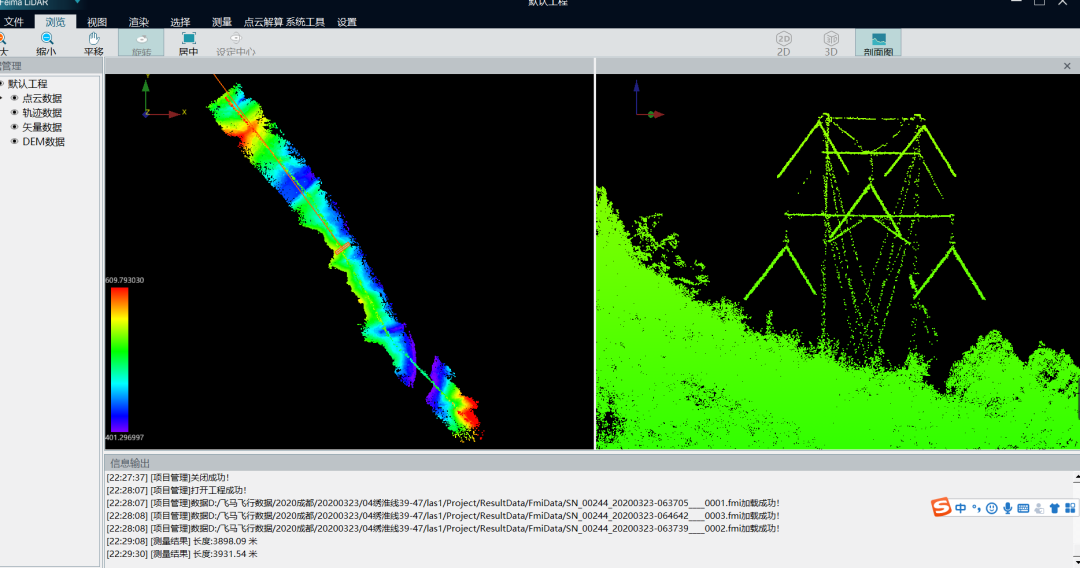 杆塔及电线清晰
杆塔及电线清晰
五、作业平台
本项目选用的作业设备为飞马智能电力巡检系统D300L。D300L是飞马机器人按照电网作业规范要求设计的一款电力巡检系统;配备主视角摄影头,在航线作业时具备实时视频监控能力;配合HGS200手持地面站,具备航线飞行及手动控制能力,并可自由切换,满足更多复杂场景应用;10公里的控制半径,具备高效的数据获取能力。

D300L智能电力巡检平台
D300L的主要平台特点如下:
- 飞行航线灵活可定制,支持高精度定位的立体智能巡线,提高精细化巡检质量和效率;
- 支持FPV手动飞行,无需预先设计航线,根据图传系统实时回传的高清视频,采用手动飞行的形式进行电力线路巡检;
- 高精度,可以保证三维地面通道和导线拟合绝对精度,平面高程优于0.15m;
- 载荷可互换,实现一个飞行平台支持正射巡检、倾斜巡检、视频巡检、LiDAR巡检以及热红外巡检等,数据成果同时支持通道巡检和电力设备三维建模等应用;
- 高可靠性,D300L按照相关规范要求进行了可靠性及电磁兼容性测试。
 D300L电磁兼容性测试报告
D300L电磁兼容性测试报告
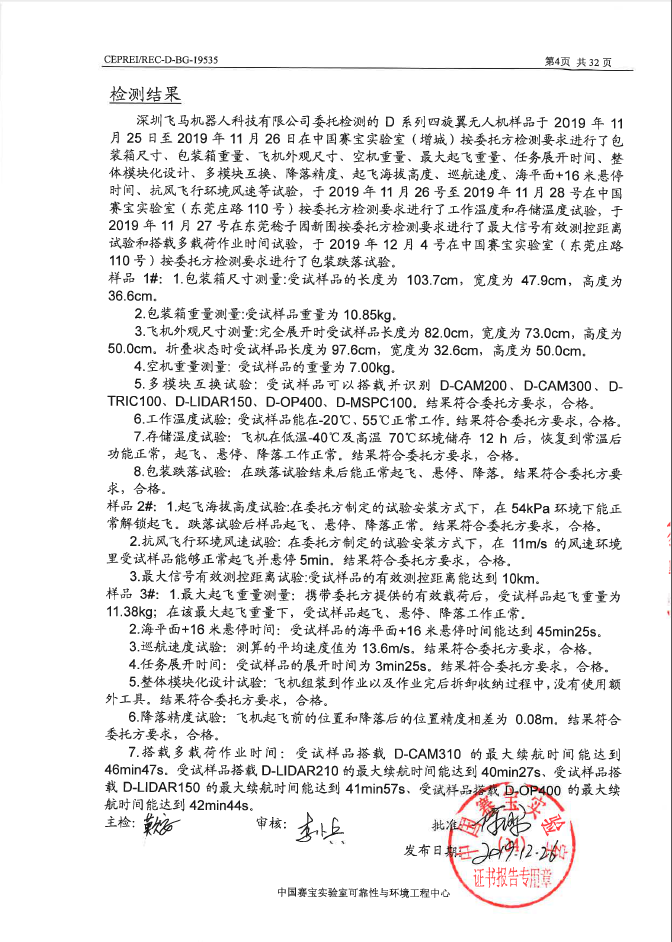 D300L可靠性测试报告
D300L可靠性测试报告
六、项目实施流程
该项目实施流程包括航线规划、现场勘查、飞行作业、数据处理、成果质检与成果提交。现场勘查的重点在于杆塔与KML是否一致,标记跨高压线、跨高铁、跨高速等飞行危险点;如果发现线路与实际杆塔不符,则及时调整航线。
为保证数据的时效性、有效性,每架次落地后及时解算并与前序架次进行数据合并,检查数据是否合格。
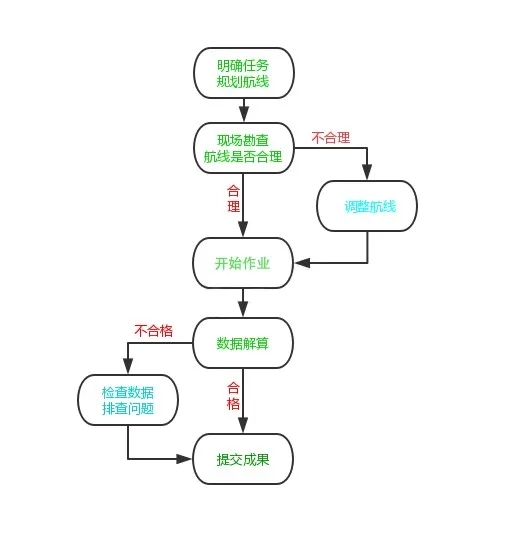
项目实施流程
基于无人机管家专业版进行点云数据预处理的流程如下图所示。
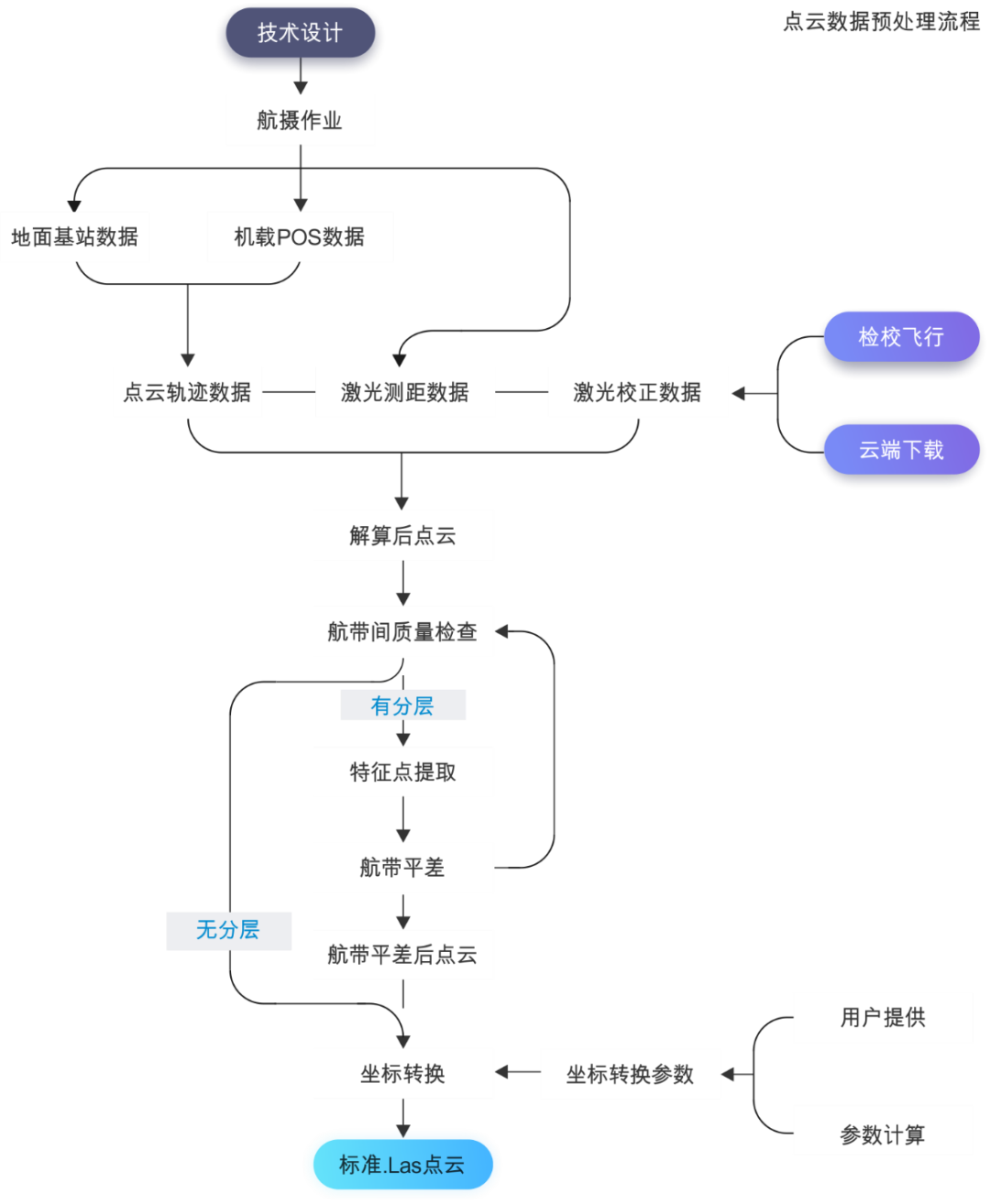 项目数据解算流程(无人机管家专业版)
项目数据解算流程(无人机管家专业版)