飞马智理图是无人机数据预处理软件,提供先进的基于检校场模型约束的相机模型自检校算法以及畸变去除工具、RTK/PPK融合解算工具等,以满足无人机高质量、高精度测绘要求;同时提供影像匀光匀色、增强、金字塔创建、格式转换以及结果精度检核等预处理功能。
此次智理图新增上线的轨迹解算模块提供高精度组合导航轨迹解算功能,可以使用GNSS 和IMU原始数据经后处理,同时输出传感器的高精度位置、姿态与速度信息,提供高精度、高可靠性的组合导航轨迹成果,支持激光雷达、相机等传感器的直接定位定向。
1、模块介绍
该模块采用了前后双向处理、平滑处理、融合处理等诸多手段以提升数据的精度和平滑度。使用紧耦合(Tightly Coupled)模式利用GNSS的伪距和伪距率,对姿态进行输出校正或反馈校正;利用整体数据对每个时间点姿态进行多维度、多模式、多次的全局最优评估;通过不同手段保证轨迹的定位定姿精度,保证数据精度平滑可用。
模块特点:
- 支持多GNSS星座自主选择
- 支持多种GNSS数据解算模式
- 支持机载、车载、行人背负等多种模式
- 支持高精度位置、姿态、速度输出
- 支持标准SBET格式轨迹输出
- 支持相机MARK点外方位元素输出
- 支持下载千寻虚拟基站数据
- 内置多种飞马载荷参数
- 一键式软件操作
核心算法:
- 动态对准
- 多模式滤波
- 多模式平滑
- 多模式融合
- 多传感器融合
- 数据质量精度评定
- IMU核心模型
图1为智理图轨迹解算模块界面,用户仅需在界面中:选择流动站GNSS数据及高精度IMU数据、选择或下载GNSS基站数据、选择载荷对应的结构参数值,即可进行轨迹解算,解算结果为标准SBET格式的轨迹文件和MARK点POS文件(传感器中有集成相机时输出)。


2、精度对比
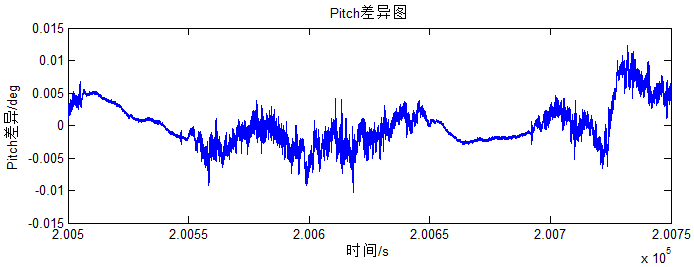
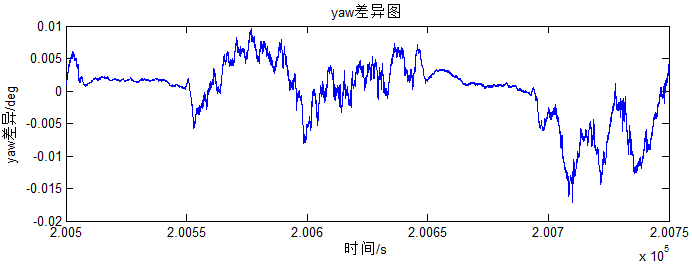
选择一组带有检查点的机载激光雷达数据,对比飞马自研轨迹解算模块的计算结果与Inertial Explorer(以下简称IE)软件的计算结果。为方便图表分析,截取同一时段内时长为250s的数据并进行差值对比。如图2所示,飞马自研算法与IE解算结果的差异平均值为Roll 1.4698×10^-15 deg,pitch -2.8911×10^-15 deg,yaw -9.3440×10^-16 deg;标准差为Roll 0.002390 deg,pitch 0.003238 deg,yaw 0.004616 deg。显然,飞马自研模块的姿态解算结果与IE软件解算结果具有较高的一致性。

3、成果对比
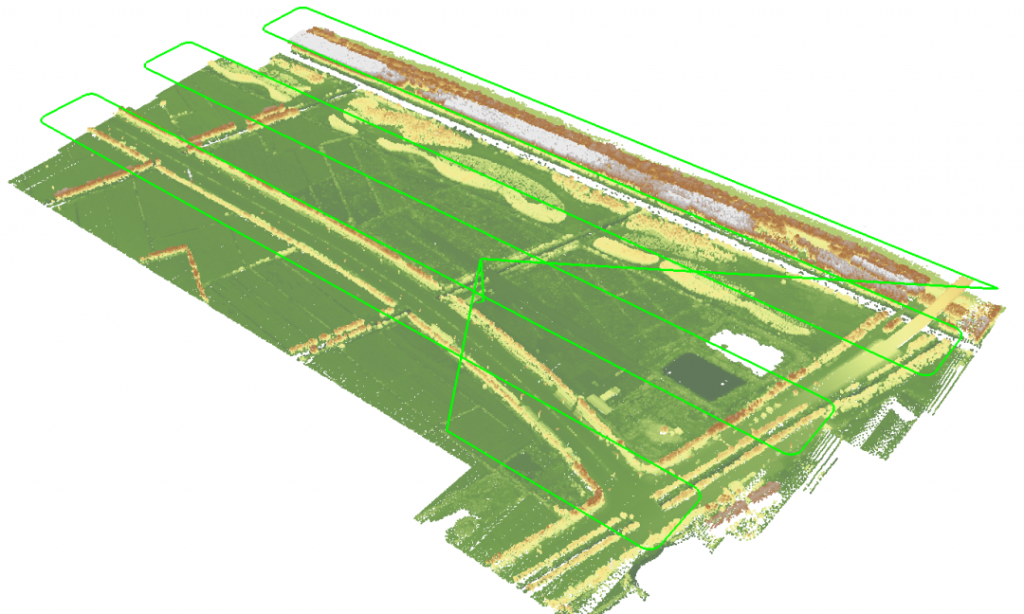
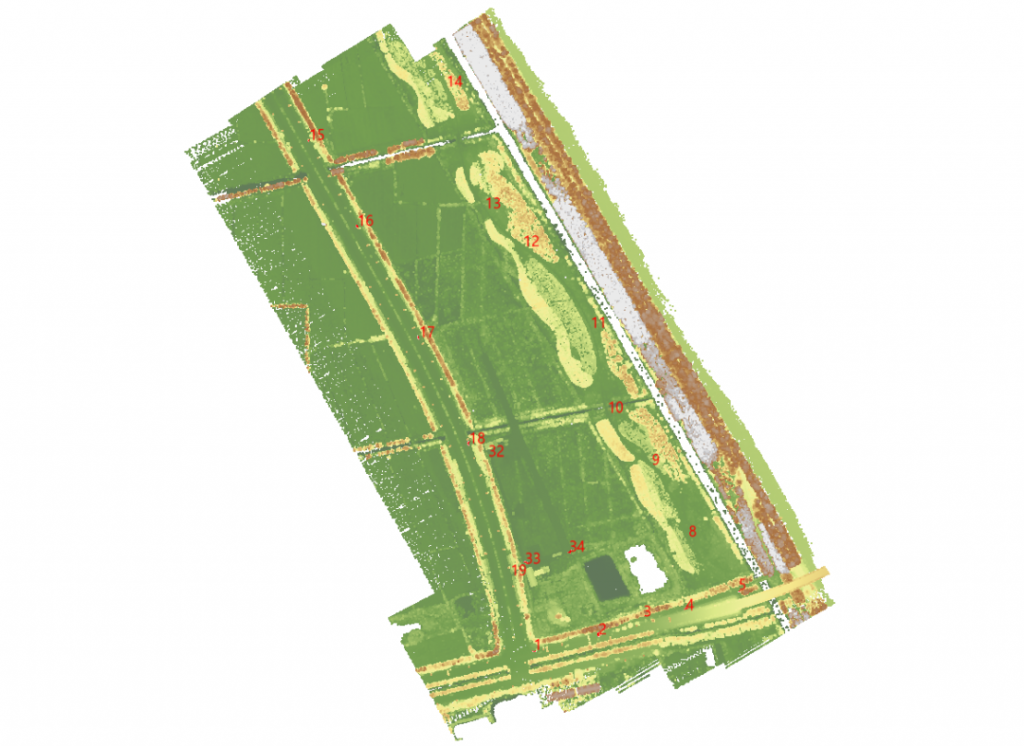
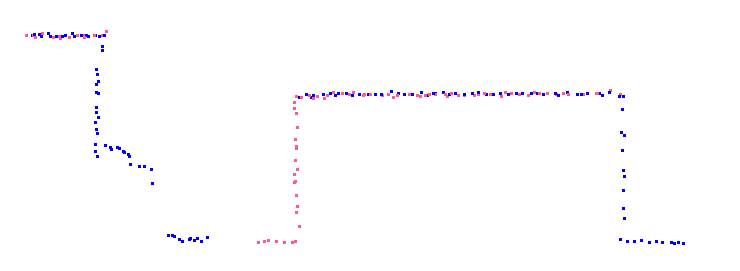
利用飞马D200搭载D-LiDar210获取激光雷达数据,先通过智理图轨迹解算模块完成组合导航轨迹解算后,再采用智激光模块进行轨迹及点云数据融合。图3为解算所得轨迹及点云成果;图4为测试所用检查点分布图,18个检查点均匀分布于整个测试场。使用检查点验证成果的高程精度,如表1所示,高程中误差3.3cm,高程误差最大值6.1cm。同理对照处理:使用IE软件完成轨迹解算,再采用智激光模块进行数据融合,所获成果数据的高程中误差为3.0cm,高程误差最大值为6.5cm。
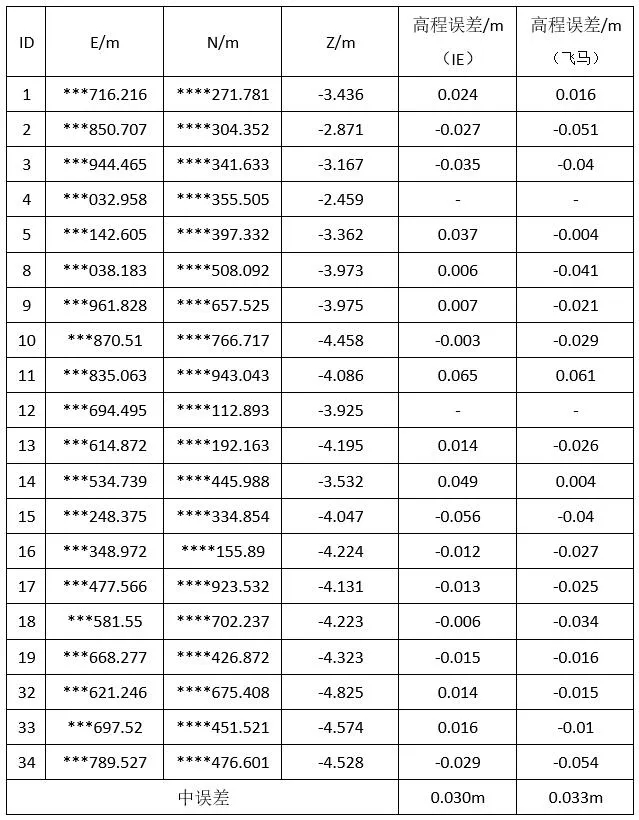
注:“******”为脱密隐去字符
“-”表示检查点1m²范围内点云数不足以自动计算点云高程,因此无差值
基于飞马轨迹解算模块的点云成果,对测区内若干房屋及集装箱进行剖面分析,结果表明房屋屋顶及集装箱侧面点云数据重叠良好、无数据分层情况,剖面效果如图4所示。综合点云成果平面及高程精度表现,使用飞马轨迹解算模块所获成果精度与IE软件相当。

4、模块获取
飞马自研轨迹解算模块现已上线,支持飞马全线激光雷达产品的轨迹解算,用户联网更新后即可使用,无需额外付费。未来,飞马机器人还将继续研发创新,在高精度组合导航解算方面支持更多IMU类型、开放更多自定义参数,服务更专业、更细分的用户需求。

