无人机管家专业版,作为一款功能强大的无人机数据综合处理软件,其全自主研发的特点决定了其可根据用户需求快速定制实现相关功能,解决用户生产痛点。目前倾斜航空摄影的应用越来越广泛,但在内业数据生产中,却存在多相机数据量庞大,数据整理耗时耗力,存在大量冗余数据导致数据处理效率低等问题。为此,飞马数据处理研发团队开发了快速图像整理工具,旨在简化数据整理流程,减少人为失误,提高内业数据处理效率,该工具已于今日上线发布,用户联网更新即可使用。
无人机管家专业版快速图像整理工具为用户提供了从倾斜数据的整理到空三工程输出的解决方案,此次发布的版本主要功能如下:
- 支持飞马倾斜系列影像数据的整理。
- 支持在线下载相机报告,并可直接导入工程使用。
- 软件自动检测并删除试拍照片及对应POS,减少人工作业量。
- 支持多架次多相机的影像重命名,并生成对应影像名字的POS文件。
- 支持去除影像旋转属性,解决影像显示方向不一致问题。
- 支持POS坐标写入影像EXIF字段,便于软件直接读取。
- 支持整理后直接输出管家工程文件及CC倾斜三维文件。
- 支持成图范围外冗余倾斜影像的剔除,减少内业空三建模数据量,提高数据处理效率。
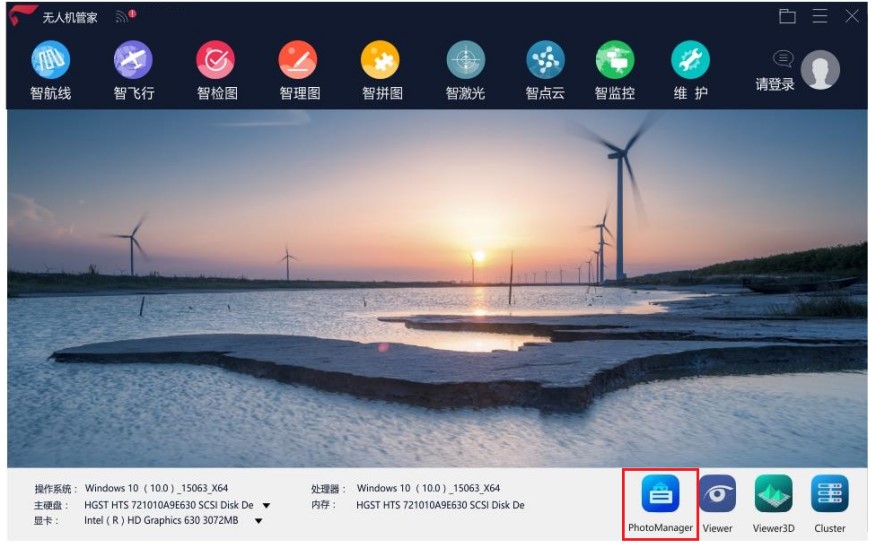
快速图像整理工具入口
工具使用说明
可在文章末尾进行最新流程文档的下载。
1、飞机载荷设置

用户选择数据对应的飞机载荷类型,此时相机库根据所选的型号会预设相机库中对应的多相机参数,点击

可查看具体的参数,若倾斜载荷的每个相机均做过相机检校,则可直接输入载荷ID进行下载,点击

软件将自动进行多个相机报告的下载。
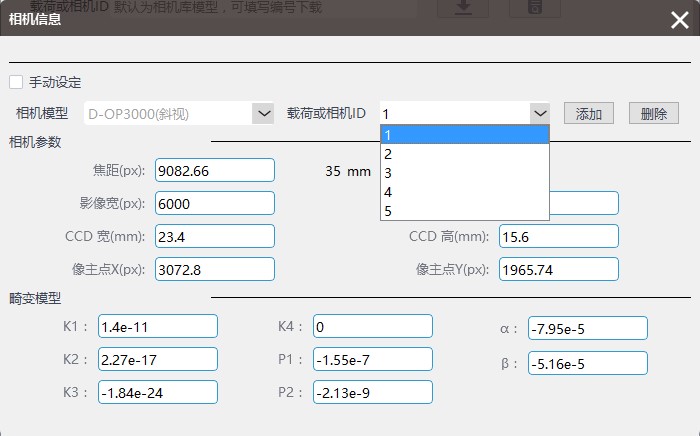
点击

可以对各相机的参数进行修改,若删除某个相机再次添加,请注意按照相机编号顺序添加。
2、数据添加及检查

1)添加照片
选择多相机影像文件夹的上一级目录作为输入路径,此时输入框将识别读取该文件夹目录下所有子文件夹。
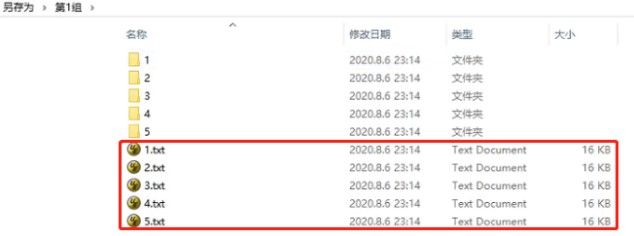
例:
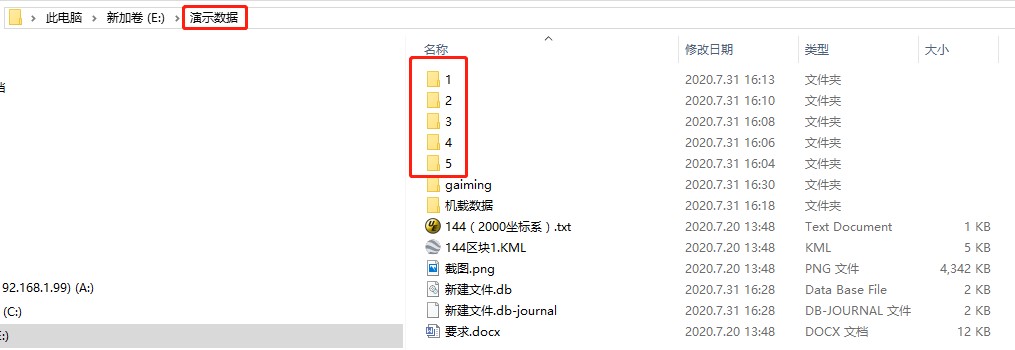
该数据1-5号文件夹里分别为五相机对应照片,此时选择的五相机影像文件夹应为【演示数据】这一级文件夹。
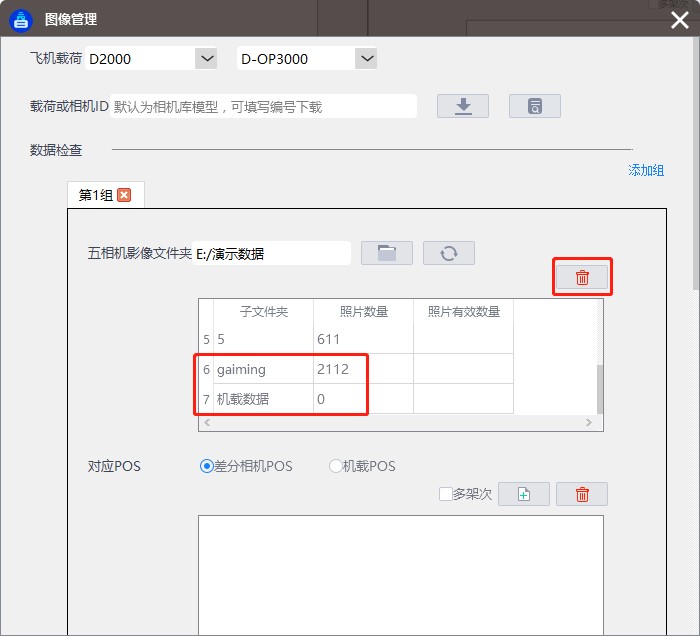
注意:此时依然会读取该目录下另外两个无关文件夹,用户需要手动选择删除。
2)添加POS文件
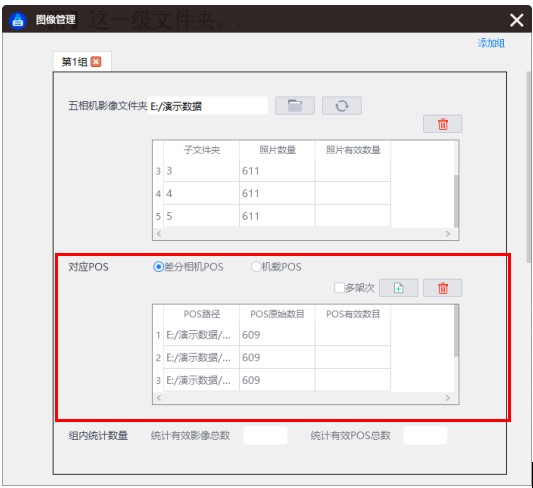
点击

选择差分解算后的相机高精度POS进行导入,其和多相机影像一一对应。
若无差分高精度相机POS,也可采用机载POS进行整理,添加单个机载POS,此时会自动复制为多个POS文件对应每个相机。
注意:
- 若当前相机照片组包含多个架次影像,该情况一般为飞行时,前面飞行架次数据未清空,导致每个相机文件夹里多个架次的影像存放一起。则勾选【多架次】,再按架次顺序添加多架次的POS文件,即可和影像对应进行整理。
- 若存在多组相机数据,可通过【添加组】,分别导入不同组数据的照片及POS。一般多架次数据,且每个架次的相片数据分别存放时,则使用该功能进行数据组添加。
3)数据检查
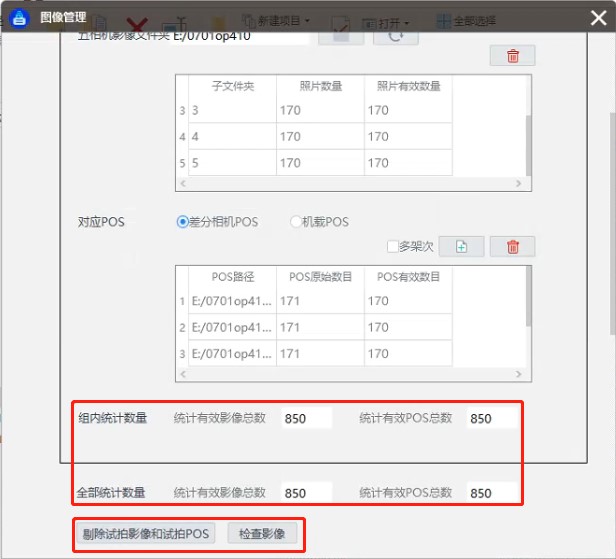
添加照片和POS完成后,点击【剔除试拍影像和试拍POS】,软件将自动检测出试拍影像和试拍POS文件,后续处理中自动忽略试拍文件(该操作并不会真实删除原始数据,仅存在于内存中)。软件会统计每组及所有组的有效照片和有效POS数目,若检测数目一致,则可进行下一步操作。若不一致,则不能进行整理操作。
点击【检查影像】,软件将会检测所有影像能否打开使用。若路径不存在或影像被损坏,则会提示报错。
注:
- 若软件自动计算的有效照片和有效POS数目不一致,则建议人工进行删除对应,保证一致后,再进行后续整理。
- 删除试拍影像和试拍POS及检查影像非必须操作,可跳过。但一般建议执行,避免数据对应错误,造成后续数据处理问题。
3、数据整理参数
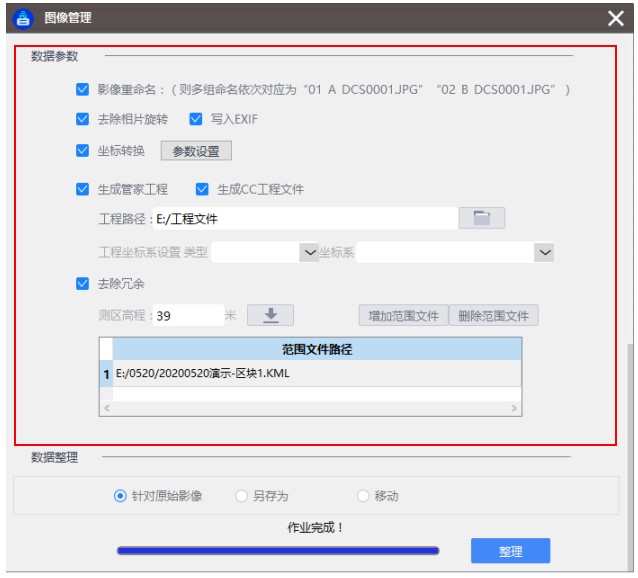
根据整理的需求进行参数设置。
【影像重命名】:对导入的相机文件添加前缀以区分不同架次、不同相机。并生成和重命名影像对应后的POS文件。影像命名方式为:组名_相机类型_原始影像名字。 其中组名定义为第一组为01,第二组为02,依次排列。相机类型为A、B、C、D、E分别对应五相机的1、2、3、4、5相机,顺序不能乱。
【去除照片旋转】:去除照片中记录的旋转属性信息,使影像显示方向一致。
【写入EXIF】:将POS中的经纬度高程信息写入照片EIXF字段中,不支持平面坐标写入。
【坐标转换】:设置七参数相关信息,也可导入智理图计算的坐标转换.config文件,软件将进行坐标转换,将大地坐标POS转为投影平面POS。
【生成管家工程】【生成CC工程文件】:直接生成包含照片、POS、相机参数、坐标系的管家或者CC工程文件,可直接导入管家或者CC进行空三处理。注意选择正确的成果坐标系。
【去除冗余】:倾斜相机航拍时为保证内部建模效果会进行区域外扩,但外扩会存在大量对测区范围内无建模作用的照片,我们称为冗余影像,将其剔除可减少数据量,进而提高数据处理效率。勾选去除冗余,并导入测区范围文件(.kml)以及获取测区地面高程,软件将自动将冗余影像剔除。测区高程可联网获取,若电脑未联网,可输入试拍点高程。
4、数据整理
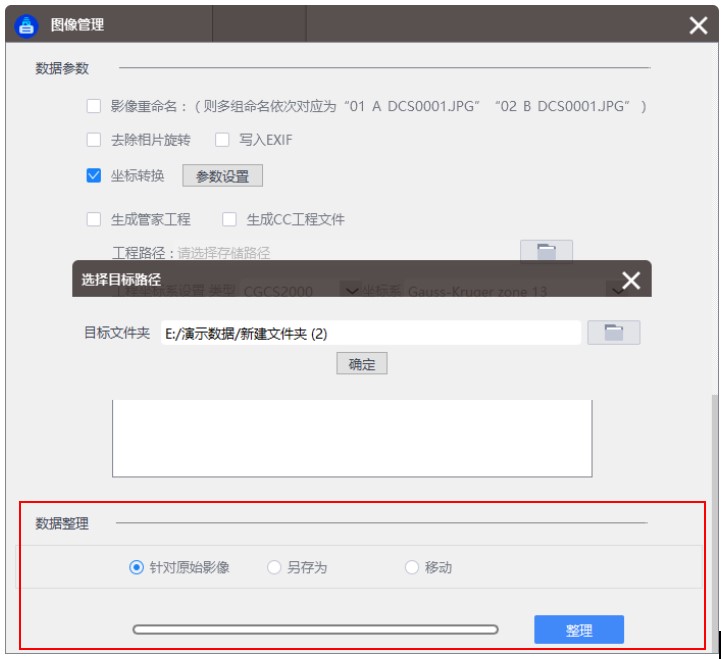
参数设置完成后,即进入整理程序。有三种方式可以选择:
【针对原始影像】:直接在原目录进行图像整理,
【另存为】:原文件保持不变,将文件复制至新的目标文件夹,在目标文件夹执行图像整理。
【移动】:将原文件剪切至目标文件夹,在目标文件夹执行图像整理。
工具使用注意事项
1.目前该功能适用于D2000-OP3000、D200-OP300、D200S/D300-OP310/OP320/OP400/OP410、V1000-OP1000、V100-OP100/OP3000、F-OP200/OP300,下一版本将支持飞马正射等载荷。
2.多相机文件夹的命名应严格按照飞马的相机组顺序进行定义,如五相机文件夹命名为1,2,3,4,5,其他命名方式不建议使用。
3.当前POS仅支持经纬度,暂不支持平面坐标系。
4.导入的照片及POS请尽可能保持原始性,请勿进行编辑后再导入,避免信息读取错误。
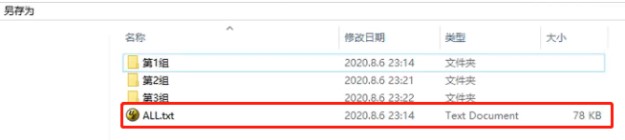
5.整理完成后,与照片名对应的POS会输出于与相机照片组同级目录下,若勾选重命名,则除每个相机对应的POS文件输出外,还会输出记录所有数据的总POS文件,命名为ALL.TXT,位于所设置的输出目录下。
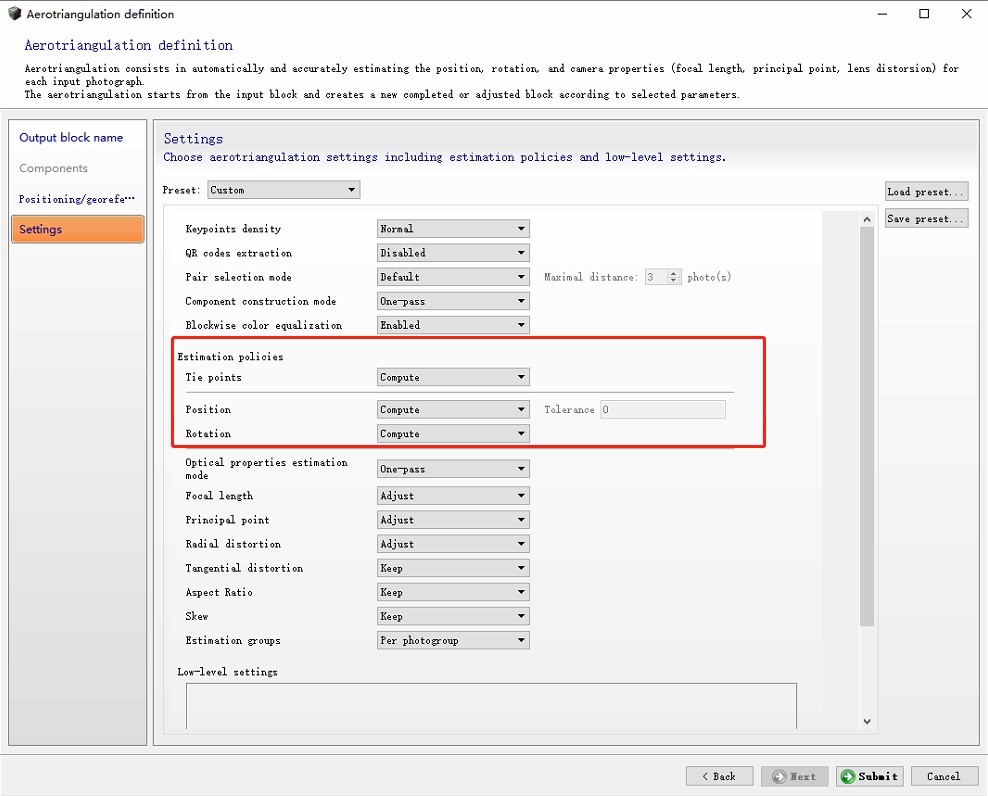
6.生成的CC工程文件,在CC里面提交空三时,位置与旋转需要选择【重新计算】。如下图红框所示。
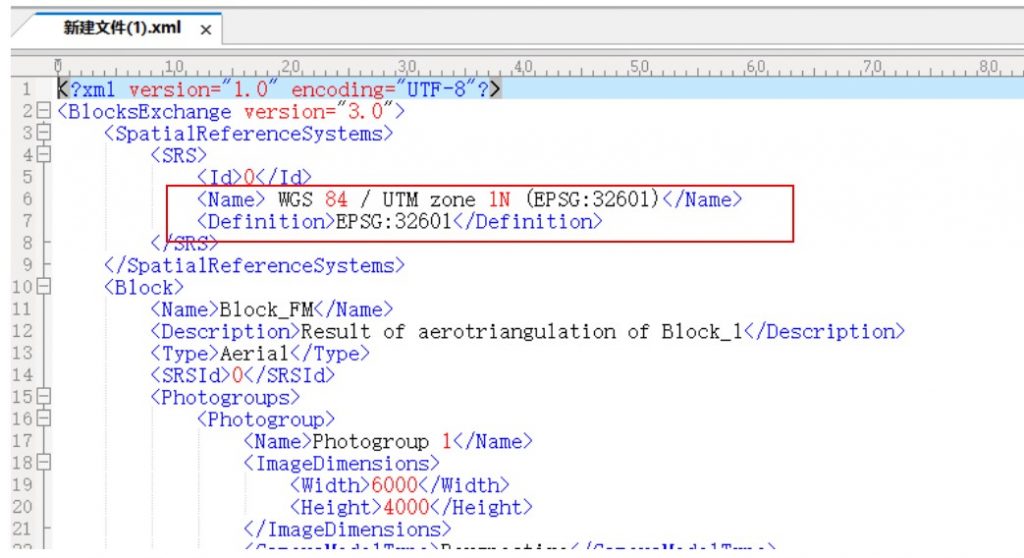
7.勾选坐标转换后,管家工程将默认为本地坐标系,CC工程坐标系默认为WGS84 UTM 1N ,可人工进行修改坐标系信息,(和CC中的坐标系代码保持一致),下一版本软件将支持管家及CC详细投影信息的写入。
8.去冗余功能仅适用于差分多相机POS,使用机载POS时不可进行冗余去除。变高航线由于角度姿态较大,不建议使用去冗余功能,会造成中间相片被去除。
9.选择原始图像整理,并勾选去冗余功能,软件只在生成的管家或CC工程中被剔除,并不会在原始数据中进行剔除,保证原始数据的完整性,避免原始数据被破坏。
10.建议使用快速图像整理工具前先进行原始数据的备份,避免操作失误导致数据被损坏。
11. 该工具在使用过程中会根据用户需求进行迭代升级,请注意联网获取最新软件版本。
