
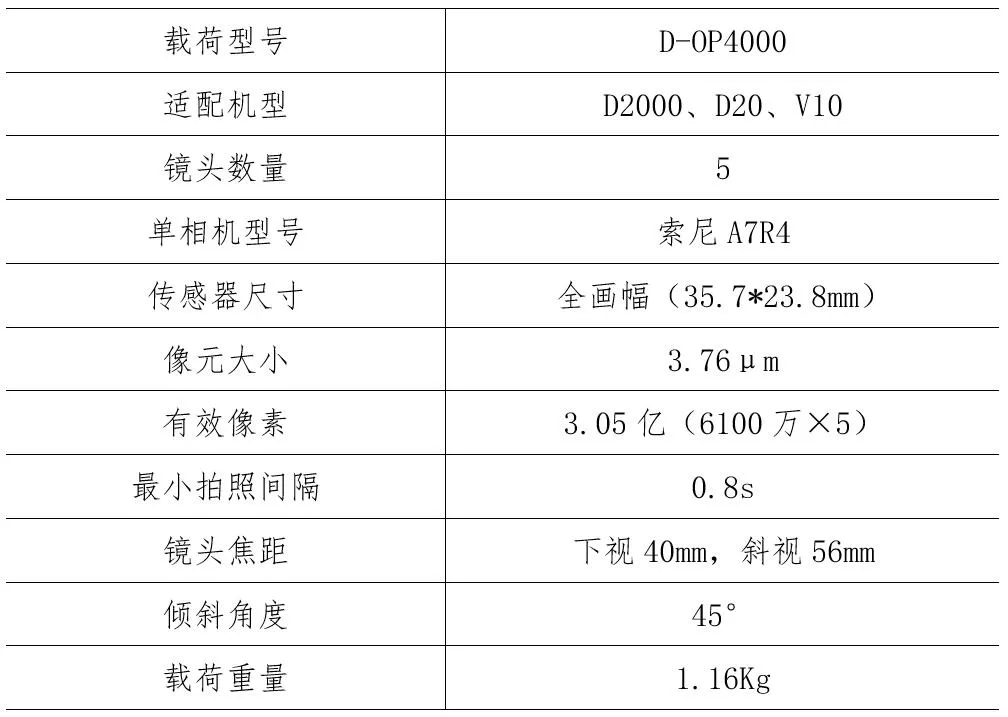
经过飞马“攻城狮”的研发、测试与验证工作,飞马D-OP4000倾斜摄影模块于2020年11月份正式上线,此模块采用的是全画幅定制改装相机,结合无人机管家智能航线设计,具备高质量的侧面纹理采集及高效率的作业能力;具备五相机同步曝光和逐相机打标能力,精确获取每个相机的精确曝光位置信息,搭配无人机管家数据处理模块,提供1:500免像控高精度倾斜航摄完整软硬件系统解决方案,可适配飞马D2000、D20、V10飞行平台。
一、模块参数
二、模块特点
1、成像质量更佳:全画幅微单相机凭借在感光面积上的优势,在相同像素条件下成像更好,可以把高感光度做得更高,由此在暗光下成像更好;
2、搭配40mm/56mm镜头组合,较长的焦距组合可以满足高落差等复杂环境下的高分辨率数据获取;
3、同样的机位下采用同样的焦距和参数进行拍摄,全画幅比APS-C画幅获得的照片视角要广,飞行高分辨率影像时可以使用更快的飞行速度;
4、免像控处理,在地形测图中可以极大减少外业像控点布设工作量,用户只需布设少量检查点用于精度检核;
5、理想的作业效率,依靠D2000超强续航能力、断点续飞功能、无人机管家智能航线设计软件,该模块可以实现更高的作业效率。
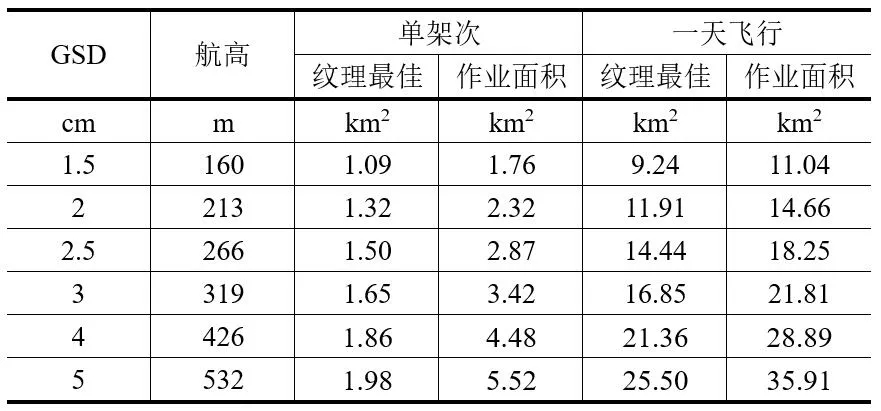
注:按照一天6架次、单架次38km航程限制,80%×65%重叠度、13.5m/s航速、耕地航线统计
三、应用案例
1、测区概况
测区位于东莞市郊区某高新区,主要是低矮的居民房、新建的高层住宅区、学校、变电站等地物,地物高差变化大,面积0.46平方公里,设计GSD为1.5cm。使用D2000智能航测系统,飞行高度160m,重叠度按照80%*78%,航时76分钟。默认生成航线预估影像数量9440张,通过航线编辑,缩减低矮房区航线外扩,保留高层建筑附近默认外扩,预估影像数量为8630张。该区块实际飞行两个架次,共获取8885张影像。

2、数据获取
选择合适的起降场地,连接千寻网络服务即可以使用网络RTK飞行,无需架设实体基站。D2000采用自主起飞方式起飞,按照预定航线进行数据获取。

3、数据处理
飞行获取的数据主要包括影像数据、机载GNSS观测数据。利用无人机管家“智理图”模块,进行网络PPK预处理,然后进行差分解算,在差分解算中结合各相机的安装角度、飞机姿态以及标记点打标时间进行偏心距改正,解算得到各个相机准确的曝光点位置。


多架次数据在导入第三方软件进行空三或模型出图时,需要将影像重命名并与POS对齐。使用飞马无人机管家的“快速图像整理”工具,可以实现多架次的图像整理,并生成可以直接被瞰景Smart3D和CC识别的xml工程文件。

4、模型效果
模型效果如下:






在大高差地物环境中,D-OP4000可以使用等高航线获取高分辨率的影像数据,保证高楼间的低矮建筑物的模型质量和数据精度。
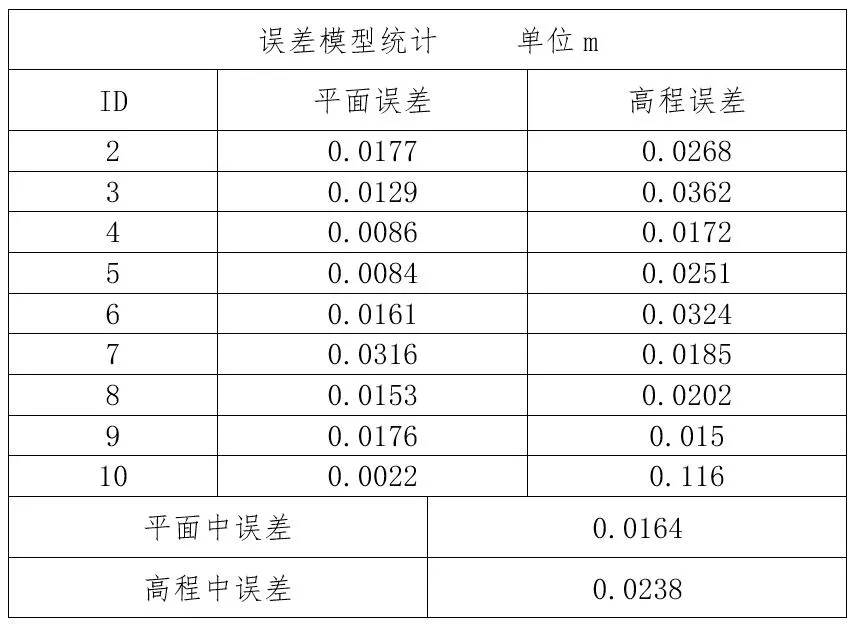
5、三维成果精度
该测试数据采用免像控数据处理,使用检查点检核三维模型精度,经过统计,三维模型的检查点平面中误差为1.6cm,高程中误差为2.4cm。
D2000搭载D-OP4000倾斜模块的三维测图解决方案可以满足航测1:500地形测图精度要求。该方案可以大幅度减少外业布控像控点的工作量,极大的提高作业效率。结合旋翼无人机特有的断点续飞功能以及大面积分区航线设计算法,适用于大面积高精度三维建模项目;结合飞马无人机管家特有的联合航线功能,同样适合小面积分散性高精度三维建模项目。


