
一、概述
飞马激光雷达背包平台系统(以下简称D-PACK100)是针对飞马全系列机载激光雷达系统推出的一体化高精度扩展平台。该平台总重6kg,工作时长不少于5小时,可挂载飞马所有已上市的机载激光雷达(以下简称LiDAR)系统,通过背包步行或骑行方式运行,实现了机载LiDAR系统的地面复用,进一步提升设备的使用价值。D-PACK100整机系统延续了飞马机器人工业化、高可靠性、全自动化的设计理念,主打高可靠性、单人作业、可复制的高精度作业模式。

图1 D-PACK100实物图
D-PACK100平台采用模块化设计,使用单块高密度智能电池,用户可根据作业需求将D200系列智能无人机平台的LiDAR模块转做地面使用,无需任何改装操作,是机载LiDAR数据的重要补充。同时,D-PACK100亦可单独用于高精度地面或室内数据采集。D-PACK100配备高精度POS系统,通过配套“无人机管家专业版”进行高精度轨迹后处理解算或后SLAM解算。
二、系统介绍
1、系统组成
D-PACK100平台主要由背包收纳支架、核心控制系统、GPS模块、控制盒、智能电池等组成,内含数据传输系统、定位系统、智能供电系统、载荷系统等;可选配地面数传电台、手持地面站和全景相机模块。
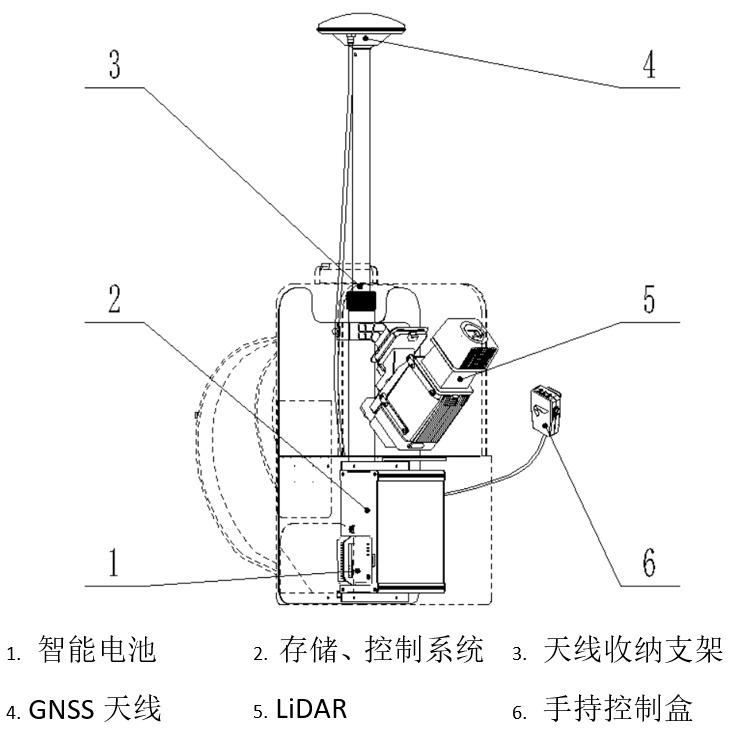
图2 D-PACK100组成
2、系统参数

三、系统特点
D-PACK100平台具有以下特点:
- 使用快拆结构,单人可快速安装和拆卸;
- GNSS天线便于收纳和携带;
- 高精度POS系统,通过后处理输出高精度点云数据;
- 人体工学设计,减少负重感,提升野外作业体验;
- 可通过飞马无人机管家专业版进行在线设备固件升级;
- 支持飞马机载LiDAR系统即插即用,无需任何软硬件改造;
- 复用飞马无人机管家专业版进行数据解算,无需另购软件;
- 复用旋翼机载高密度智能电池,无需另购电池;
- 选配地面手持终端,可实时监控设备状态和进行设备控制;
- 选配全景相机模块,同步获取影像数据,通过后处理为点云赋色;
- 采用SLAM后处理技术,实现无GPS工作测量模式;
四、工作模式
1、基于高精度POS后处理模式
基于高精度POS后处理的模式,与机载LiDAR数据获取和处理一致,需要在GNSS搜星条件良好的室外环境进行作业。根据基站GNSS、流动站GNSS及高精度IMU数据进行POS联合解算,并与LiDAR点云数据进行融合,获取激光点云的绝对位置。
 图3 使用管家进行轨迹解算
图3 使用管家进行轨迹解算
 图4 针对D-PACK100选择背包模式进行点云解算
图4 针对D-PACK100选择背包模式进行点云解算
在该模式下,用户可通过D-PACK100平台手持控制盒或者手持地面站(选配)的状态灯观察GNSS搜星状态,确保在良好的户外环境进行数据采集。该模式可应用于土方测量、航测数据补测、建筑物立面测量等的LiDAR点云数据获取。
2、基于SLAM后处理模式
在SLAM后处理模式下,用户无需GNSS信号便可通过SLAM技术对D-PACK100平台所获LiDAR点云数据和高精度IMU数据进行事后处理,生成三维点云。该模式可应用于森林区林木调查、地下车库测绘、粮仓内部测绘等无GNSS环境下的三维点云获取。
当前D-PACK100平台硬件设备已支持SLAM后处理模式,无人机管家专业版配套功能尚在开发中。
五、应用案例
1、河道测量
挂载设备:D-LiDAR110
测量场景:河道及周边道路
2019年12月,对某市内河道进行测量。由工作人员背负挂载了D-LiDAR110的D-PACK100,在枯水期的河道内进行数据采集。通过架设基站连接CORS进行坐标采集,并经由飞马“无人机管家专业版”完成数据解算,便可获取具有绝对位置坐标的三维点云数据。图5为外场数据获取现场图,图6、7为试验所获点云数据。

图5 外场数据获取
 图6 河道点云数据
图6 河道点云数据
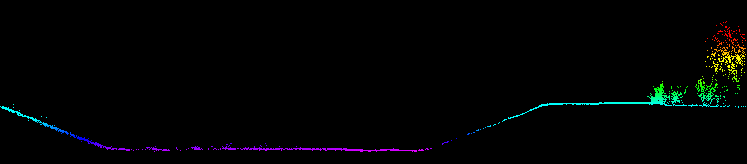 图7 河道点云剖面图
图7 河道点云剖面图
2、停车场测量
挂载设备:D-LiDAR150
测量场景:地上停车场
2019年11月,工作人员背负挂载了D-LiDAR150的D-PACK100平台进行地上停车场数据获取。通过对所获三维点云数据进行混合模式渲染,可以识别出地面停车标志线、车辆、周边地物等。该数据经处理后,可以用作智慧停车场的基础数据,也可以服务作业时段停车量及车辆类型等信息的提取用途。

图8 停车场点云数据

图9 停车场点云数据放大图
3、道路测量
挂载设备:D-LiDAR110
测量场景:城市道路
2020年1月,工作人员背负挂载了D-LiDAR110的D-PACK100平台对某地某街区的道路进行了往返测量。图10所示为试验所获的三维点云数据,可以用作城市道路三维建模或资产统计等源数据。
 图10 道路及周边点云数据
图10 道路及周边点云数据
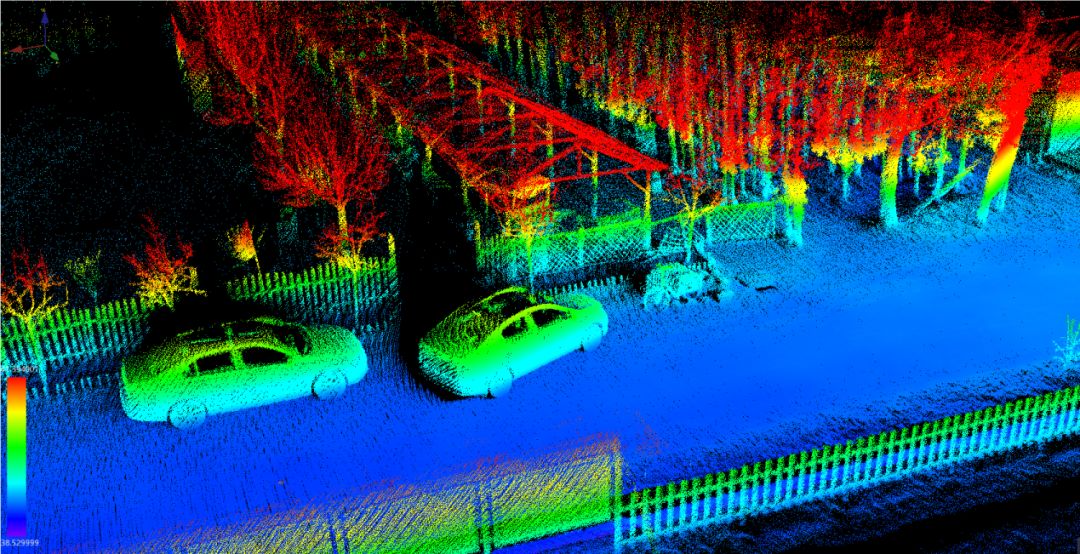 图11 道路部分区域点云数据
图11 道路部分区域点云数据
4、公园测量
挂载设备:D-LiDAR150
测量场景:公园道路及树木
2019年11月,工作人员背负挂载了D-LiDAR150的D-PACK100平台对某一线城市公园内部进行数据采集。如图12所示,该平台可以完整获取公园内绿植的三维信息,可服务智慧公园管理等用途。
 图12 公园区域点云数
图12 公园区域点云数
六、总结与展望
当前,D-PACK100平台搭载D200系列机载LiDAR模块,已支持在GNSS接收条件良好环境下的数据采集作业,虽然对GPS环境仍有一定要求,但已极大扩展了飞马机载高价值LiDAR设备的应用场景,也为用户提供了更加多元化的数据获取方案。且随着飞马后SLAM研发的进一步推进,D-PACK100平台所面临的环境限制也将被进一步打破,为用户持续创造更大的设备复用价值和数据价值。此外,飞马机器人也在同步创新研发车载、船载LIDAR移动式平台,为持续专业的多场景应用打造利器。


