差分无人机GPS天线和相机在安装时存在一定的安装偏量,一般情况下,经差分解算直接输出的结果为GPS天线相位中心的坐标,而我们在数据处理时需要的是相机拍照时刻准确的位置信息,因此需要根据安装偏量和飞行姿态进行偏心改正,获取相机的高精度GPS数据。
D200差分解算新处理流程:
早期无人机管家D200差分解算和偏心改正是进行分离的,但为了用户方便,无人机管家对D200的差分解算流程进行了修改,将偏心改正直接集成与差分解算流程之中,即在差分解算时勾选对应机型的偏心改正,即可直接输出相机的高精度GPS。其具体流程如下:
1处理流程
输入基站和流动站数据,设置好解算方式和垂高后,勾选偏心距,勾选对应机型载荷,则软件差分解算的同时进行偏心改正,输出相机曝光点精确GPS结果(_cam文件)。

2 处理结果说明:
其结果如下:
D200-正射相机–偏心改正结果样例
2018-09-21 14-55-07_all.txt PPK/RTK融合结算轨迹
2018-09-21 14-55-07_config.txt GPS解算设置
2018-09-21 14-55-07_pos.txt GPS解算结果(天线相位中心)
2018-09-21 14-55-07_pos_cam.txt GPS解算结果(相机中心)
2018-09-21 14-55-07_rtk_pos.txt 仅RTK结果(相位中心)
D200-倾斜相机–偏心改正结果样例
2018-09-21 14-55-07_all.txt PPK/RTK融合结算轨迹
2018-09-21 14-55-07_config.txt GPS解算设置
2018-09-21 14-55-07_cam1_pos.txt GPS解算结果(1镜头相机中心)
2018-09-21 14-55-07_cam2_pos.txt GPS解算结果(2镜头相机中心)
2018-09-21 14-55-07_cam3_pos.txt GPS解算结果(3镜头相机中心)
2018-09-21 14-55-07_cam4_pos.txt GPS解算结果(4镜头相机中心)
2018-09-21 14-55-07_cam5_pos.txt GPS解算结果(5镜头相机中心)
2018-09-21 14-55-07_pos.txt GPS解算结果(天线相位中心)
2018-09-21 14-55-07_rtk_pos.txt 仅RTK结果(相位中心)
注:数据处理时选择相机中心的GPS(带有_cam字符) 结果进行后期处理,如坐标转换,智拼图数据处理。
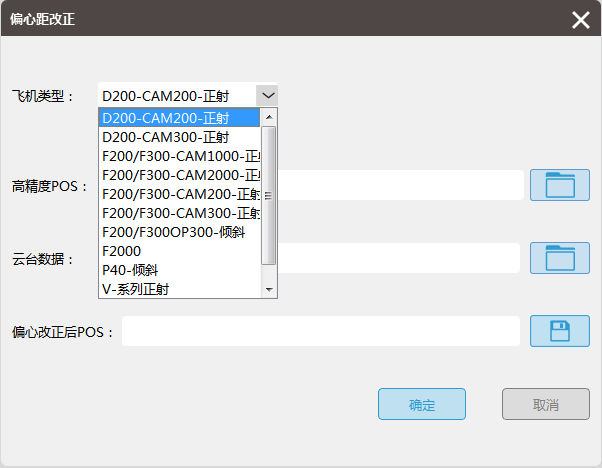
旧处理流程:
另智理图模块中仍然保留了单独做偏心改正的模块, 如D200差分解算未勾选偏心改正,还可再到智理图-实用工具中使用偏心改正,即可输出相机的高精度GPS信息,但一定要注意,该功能只能使用一次,切勿重复使用。
注:
不同机型的偏心改正方式不同,如F300是在空三过程中进行,该流程仅对D200差分解算适用。
