一、软件升级说明
高精度POS辅助空三平差,可实现稀少像控成图或一定条件下的免像控成图。飞马无人机管家的差分解算模块支持RTK、PPK、RTK/PPK融合等多种差分解算模式,其算法强大,差分解算固定率高,可靠性强,且其软硬件一体化的设计模式可实现相机曝光时刻的精确位置获取。自推出后,便受到了广大用户的认可,随着用户应用场景的增多,软件进行了全面的升级,升级更新后的功能特点如下:
· 引导式操作设置,一键式差分解算输出;
· 支持飞马全系列飞机的差分解算;
· 免费支持大疆精灵4RTK 差分解算;
· 支持飞马虚拟基站下载,可进行WGS84和CGCS2000坐标系统选择;
· 支持RTK、PPK、RTK/PPK融合等多种差分解算模式;
· 支持GPS 北斗和GPS+北斗双模系统混合解算;
· 支持格式转换、GPS差分解算批处理,添加多个任务后可实现自动批量处理;
· 根据相机与GPS天线的安置关系及飞行姿态进行偏心改正,可得到每个相机的高精度POS。
二、作业流程说明
GPS差分解算主要包括三个步骤:格式转换和GPS差分解算及差分质量检查。
格式转换是将不同飞机不同格式的GPS数据统一转换为GPS标准交换格式:RINEX格式。
GPS差分解算:设置流动站、基站及GPS解算相关参数信息,进行GPS差分解算,获得每个相机的高精度POS数据。
差分质量查看:检查差分质量,判断能否应用于后续数据处理。
1、格式转换
格式转换是将流动站、基站的数据统一转换为RINEX格式,用于GPS差分解算。
1)针对*.rt27,*.GNS,*.compb,*.fmcompb格式,转换采用智理图GPS解算模块中的GPS格式转换工具,针对atom格式转换则采用ATOM格式转换工具(针对F300飞机,此处不具体介绍),而对于第三方基站管家不支持的格式则采用第三方软件转换为RINEX格式。

2)单文件转换:
GPS文件:选择待转换的基站或流动站的原始GPS观测文件,
RINEX文件:软件默认转换路径为原始GPS观测文件同级目录下,可修改。
点击确定,即完成数据转换。
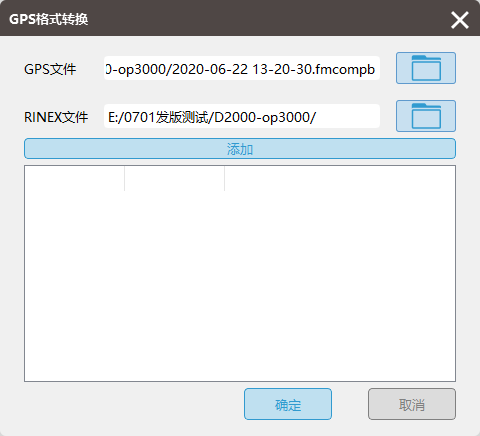
3)多个文件转换:
设置完单文件转换,点击“添加”,即加入到任务表中,可添加多个文件转换,软件将依次按照添加顺序进行转换。还可进行任务的删除,清空及原始数据的查看。

2、GPS差分解算
GPS差分解算是基于流动站和基站数据,并根据差分作业模式进行差分解算,获取每个相机的高精度POS数据。
2.1流动站设置
· 选择【GPS处理】功能中【GPS解算】工具;

· 选定【流动站】文件路径,流动站观测文件为飞机GPS原始数据转换得到的*.O文件。(其中O文件后缀还带有时间序列,如2020年数据,则为“*.20O”文件)
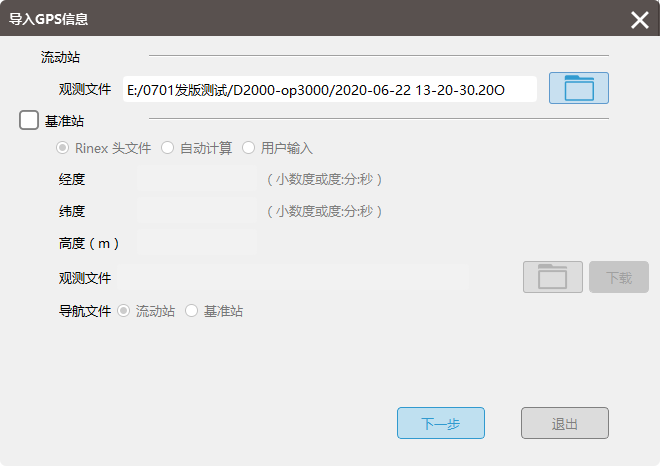
2.2基准站设置
当采用差分或融合差分GPS解算模式时,需要进行基站的输入,软件支持实体基站和虚拟基站的输入。
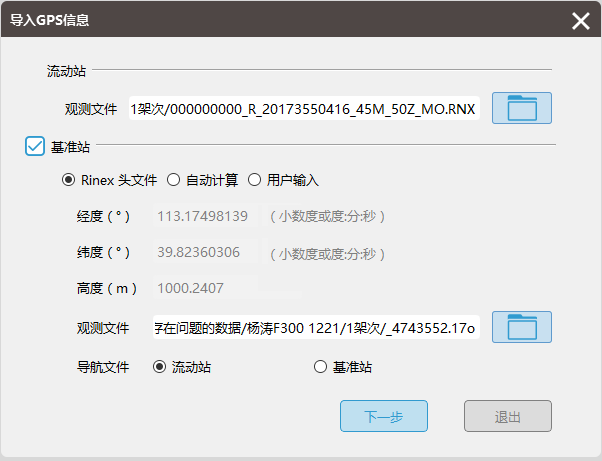
1) 实体基站设置
勾选【基准站】,首先选择基站观测文件。其坐标读取方式有三种:
A、RINEX头文件
适用于基站记录的坐标和实际基站架设的坐标一致。
默认勾选RINEX头文件,即可直接读取观测数据*.O头文件记录的WGS84/2000经纬度、椭球高坐标。
导航文件一般默认读取流动站的星历导航文件,若流动站的导航文件不存在,软件也支持基准站的导航文件使用。
B、自动计算
该模式为根据观测值自动计算的相近坐标,非准确位置,仅适用于对精度要求不高的应用场景,一般不建议使用。
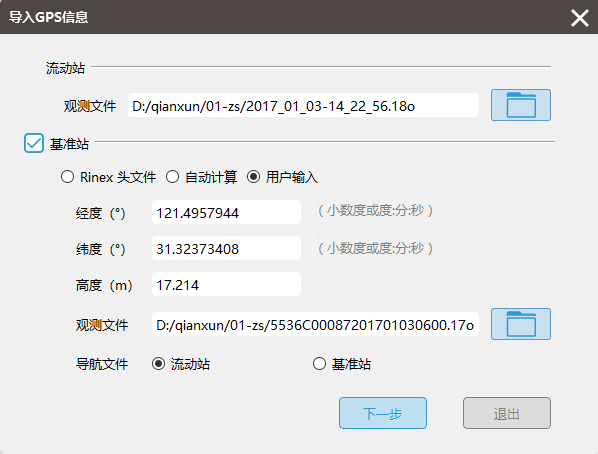
C、用户输入
当基站头文件记录的非实际架设坐标时,则应用用户输入模式,输入已知点经纬度、高程坐标,一般应为WGS84/CGCS2000经纬度坐标和椭球高坐标。若客户最终成果需要其他坐标系水准高数据,则后续通过坐标系转换实现,不建议此处输入其他坐标系、高程系统的数据。
勾选“用户输入”,输入基站架设已知点经纬度坐标(支持小数十进制度及度分秒格式),观测数据指定基准*.O文件,导航文件默认为流动站;
2)虚拟基站模式
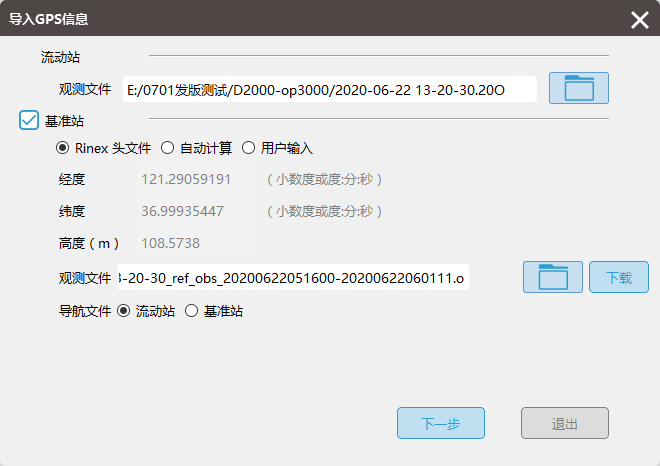
若飞机开通了PPK差分解算服务,则可进行飞马虚拟基站下载。
首先指定流动站观测文件,勾选基准站,并设置选择“RINEX头文件”,点击下载,根据飞行端口(目标坐标系)进行选择(8002对应WGS84,8003对应CGCS2000),下载对应的基准站文件,下载目录会自动生成4个文件夹,其中upload为机载上传数据,download为虚拟基站数据包,log为基站下载日志,base为基站解压后数据,且base文件夹中的*.O文件中已经记录天线相位中心坐标;选择【RINEX头文件】会自动读取天线相位中心坐标。

2.3 GPS解算参数设置
1)偏心改正
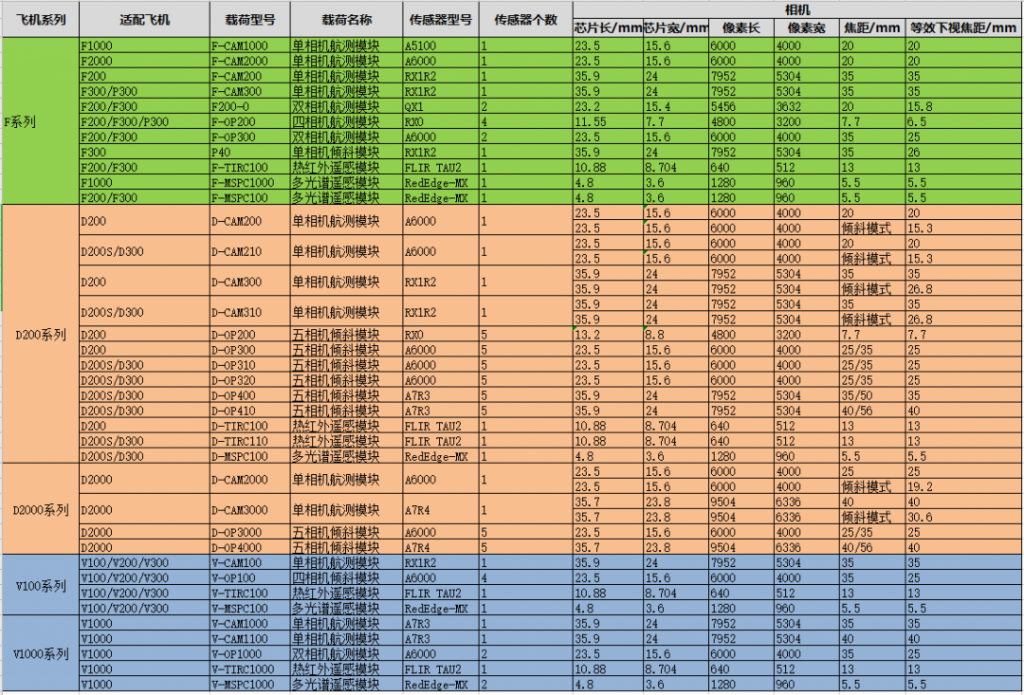
由于GPS天线相位中心与相机位置存在安置差异,因此需要经过偏心改正,将获取到的GPS天线相位中心POS改正到相机曝光时刻的相机焦点位置对应的高精度POS数据,由于不同机型安装偏量不同,用户需要根据实际的机型及载荷选择对应的偏心改正方式。飞马不同机型对应的载荷情况如表。

2)解算方式
GPS解算不同模式说明:
· 单点解算:适用于无基站,仅需提取粗略飞行POS的作业场景,其只需输入流动站文件,无须设置基站文件,即可解算获取单点定位的机载POS文件。
· 差分解算:指的是PPK后差分解算,适用于飞机和基站独立观测,无数据链路传输,且基站为同时段观测数据,即可通过PPK后差分解算高精度POS数据。
· 融合:指的是RTK/PPK的融合差分作业模式,适用于飞机和基站通过RTK作业模式连接,经融合差分解算即可获取高精度POS数据,其融合模式是优先使用后差分固定解结果,而对于PPK非固定解部分则采用RTK固定解数据进行融合,通过互补的作业模式保障高精度POS数据的质量。融合差分解算时需要输入RTK轨迹文件。
· 在线RTK:指的是获取相机飞行作业时的实时RTK数据,适用于飞机飞行时连接了RTK作业模式,且全程RTK作业正常,用户想要快速获取高精度GPS数据的场景,尤其适用于小范围,无信号遮挡作业区域。
3)GPS天线
由于差分解算需要的基准站坐标为GPS相位中心坐标。当前面输入的基站坐标为地面点坐标,而非GPS相位中心坐标时,则需要输入GPS天线高度,软件将自动算到GPS相位中心。
GPS天线的输入有两种模式:
· 斜高模式:
只适用于飞马基站,指的是由基站点量测到飞马基站配的测量片位置,选择对应的飞马基站类型(Ubase或RTK100基站),并填入量测斜高值。
· 垂高模式:
1)适用于飞马基站在飞行作业时采用垂高计算器计算到垂高,则可直接填写。
2)适用于第三方基站,由于不同厂家基站结构不同,第三方基站建议直接通过其手簿导出垂高信息输入。重要说明:
1、对于按照飞马基站标准作业流程方式,其基站RINEX已记录为GPS相位中心坐标,其垂高设置为0即可(默认设置)。
如飞行作业前基站采集已知点,未量测斜高,其垂高设置为0时即为采集到GPS相位中心,飞行时基于该点进行飞行,则在差分解算时直接读入RINEX坐标,垂高为O即可。
如飞行作业前采集已知点,输入了斜高,并通过垂高计算器计算到垂高,则该已知点为地面点,飞行时基于该点并同时输入了垂高(软件同样记录到GPS相位中心坐标),则在差分解算时直接读入RINEX坐标,垂高为O即可。
2、若基站为虚拟基站,基站坐标已经为天线相位中心坐标,此处选择【GPS天线/垂高】,并且设置垂高为0m。
4)GNSS系统
差分解算时使用的卫星系统。一般默认为勾选使用GPS、Beidou,软件将分系统解算并进行融合。若解算完固定率较低,可尝试同时勾选GPS/Beidou混合进行解算,一般会提高差分解算质量。
5)高级设置(可选)
主要针对GPS数据默认参数解算不好的情况时进行的人工干预处理,可提高差分固定率。
A 历元间隔
基线处理时,软件从原始观测数据中抽取数据的间隔,其中【默认】是使用飞马推荐的GPS数据采样频率进行处理,【原始】是指使用GPS数据的原始采样频率处理。一般情况下选【默认】即可,针对固定率偏低的数据,选择【原始】模式,计算效率会变慢,数据解算固定率一般会有所提高。
B 信噪比
体现了数据的信号质量,可通过右侧【查看】按钮查看GPS数据的信噪比质量,首先在弹出的小工具的第一个列表框里选择【SNR/MP/EL】,第二个列表框中选择【L1 orL2】,若SNR一栏中为空,软件信噪比文本框需要填0(默认信噪比是30dBHz)。
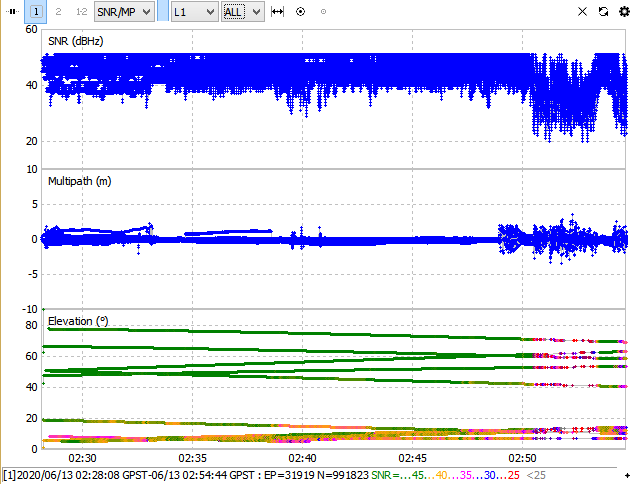
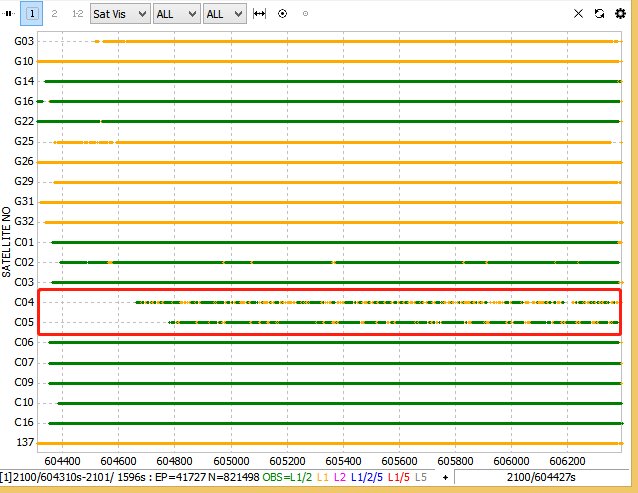
C 排除卫星
点击【查看】可以弹出查看流动站信号的小工具,解算前在排除卫星文本框填入卫星编号,以空格间隔,可以将特定卫星剔除,使其不参与计算,评判一颗卫星是否可以参与计算,一方面看卫星信号的连续性,另一方面查看卫星信号的信噪比,若可视卫星信号断断续续(如下图所示的C04、C05),或信号信噪比低于30,可将该卫星剔除,不参与计算。

6)RTK输入及成果输出设置:
RTK轨迹:针对融合差分及在线RTK作业模式,需要进行RTK轨迹文件输入。不同机型的格式一般为fmnav、gsof或者pvt格式。
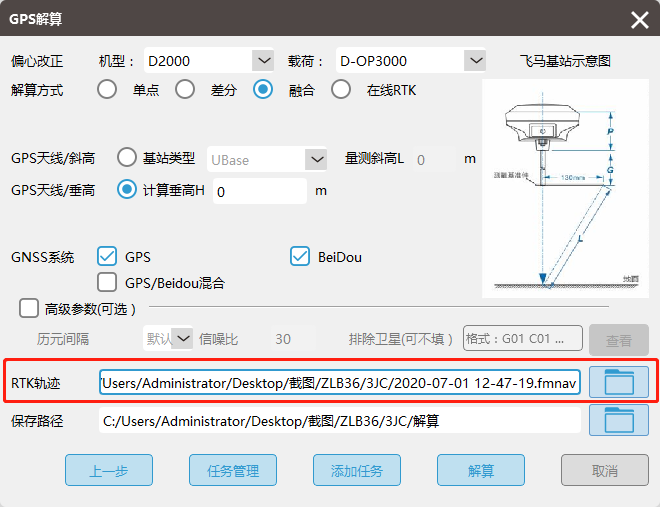
保存路径:指定GPS差分解算输出成果路径。
2.4 GPS差分解算及批处理
1)单文件处理
GPS参数设置完成,点击解算,软件将进行当前数据的差分解算。
2)多文件批处理
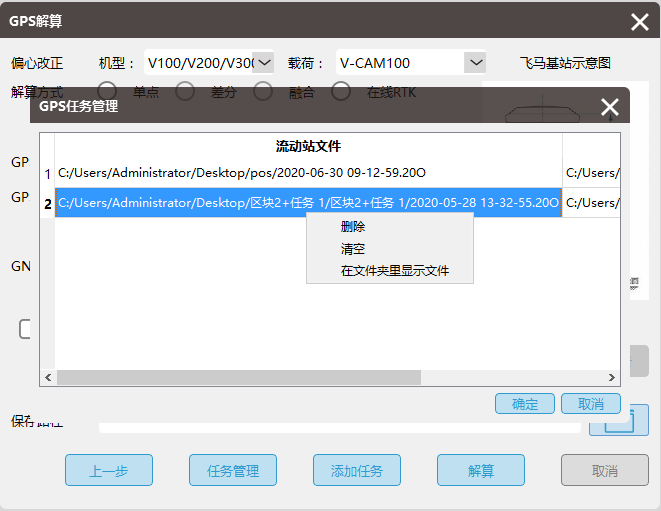
飞马无人机管家2.8.5.4版本增加了批量解算功能,用户在添加完第一组流动站数据、基站数据,并完成相应设置后,点击【添加任务】将当前任务添加至【任务管理】,点击【上一步】,返回上一级继续添加第二组数据,将所有需解算的任务添加至【任务管理】后,点击【解算】,进行批量解算。
注:
1.任务管理菜单支持删除或者清空已添加的任务,并查看重要参数信息,但是暂不支持修改解算设置;
2.当任务管理器中存在任务时,差分解算只读取任务管理器中的任务进行解算,不读取当前界面中的数据。因此若只有单组数据需要解算则无需添加任务,直接解算即可。
3、质量检查
差分解算完成后,须进行差分质量的检查,其差分质量通过解算的照片固定解的百分比来表现。
解算结果包括每个相机的高精度POS文件及处理后中间文件。
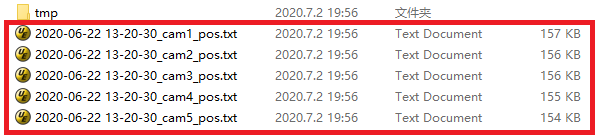
1)单/多相机中心POS文件:
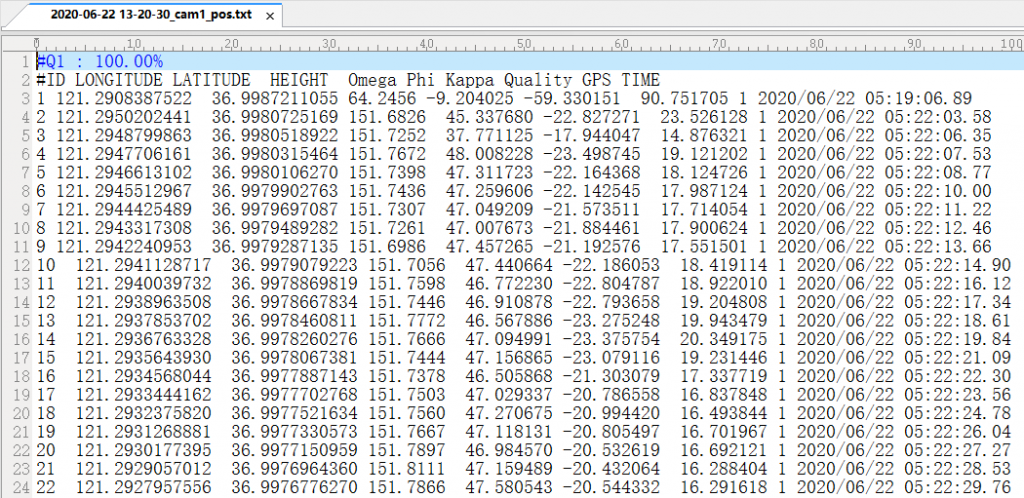
一般为带有CAM命名的POS文件:如_(nadir)_cam(1-5)_pos.txt:其为GPS解算通过偏心改正计算到每个相机曝光时刻的高精度POS数据,也是后续坐标转换、空三数据处理等所需使用的POS文件。
打开_(nadir)_cam(1-5)_pos.txt文件,通过文件第一行的Q1值来判定此次解算结果是否可用,Q1值是差分pos质量好坏的体现,具体来说是每个曝光点在打点时候是否固定,若固定,则会在差分pos文件中第八列,以数字“1”进行表示,Q1值=曝光点固定的个数/总曝光点数*100%,通常情况下,差分质量在百分之98以上,属于合格
2)tmp文件夹:
GPS解算的中间文件,则包含了差分解算设置、GPS相位中心等系列文件,用于差分解算异常时便于问题查找。
tmp文件夹中包括了解算过程中的过程文件:
_all.txt:PPK后差分的轨迹文件;
_pos.txt:GPS相位中心的融合或后差分POS文件;
_rtk_pos.txt:融合差分作业模式下GPS相位中心对应的RTK POS文件;
_config.txt:配置文件
_all.pos文件:单镜头机载POS(倾斜数据为.fpos)

三、常见问题说明
1、差分解算路径下无相机POS输出,但tmp下有_pos.txt文件(GPS相位中心差分POS)。
检查原始数据是否完整,机载POS文件(单相机一般为.pos,多相机一般为.fpos文件)应与流动站RINEX数据在同一路径下。为保持GPS解算正常,尽可能保持从飞机下载的机载GPS数据完整,不做任何删减。
2、差分解算固定率低
差分解算检查后须进行差分质量的检查才可使用,一般差分固定率为100时代表每个相机曝光点均为固定解,其定位精度优于5cm。GPS解算一般按照默认参数进行,若差分固定率低于100,可尝试修改GNSS系统:如增加勾选GPS+北斗的混合解算。如质量仍不高,则勾选高级参数选型,修改历元间隔,信噪比等参数,而对于存在信号干扰的数据,则可剔除干扰卫星进行差分解算。
由于GPS差分质量受卫星环境,作业环境等影响,并不能保证每个架次解算差分质量均在100,在调整各种参数仍不能保证100的情况下,可适当放宽,如90以上,再结合控制点,空三采用控制点和GPS的联合平差来保证数据精度。
3、差分解算路径下除tmp下有config文件,无任何结果。
检查基站和流动站是否同时间观测,必须存在交集,一般基站观测时间应涵盖流动站观测时间。
4、虚拟基站下载不成功时如何处理
虚拟基站下载不成功存在多种情况,常见异常及处理方式如下:
1)未登陆飞马账号,则联网并登陆飞马云账号。
2)网络环境导致,可尝试多次提交任务下载。
3)飞机未开通PPK服务,则联系售后进行飞机PPK服务的开通
4)电脑防火墙杀毒软件导致,可关闭此类软件,并重新进行格式转换,并再次下载。
格式转换异常,一般转换的O文件为原始POS文件的2-3倍数据量关系,若过小,则尝试重新转换,或联系飞马内业处理人员。
5、虚拟基站下载到多个基站文件
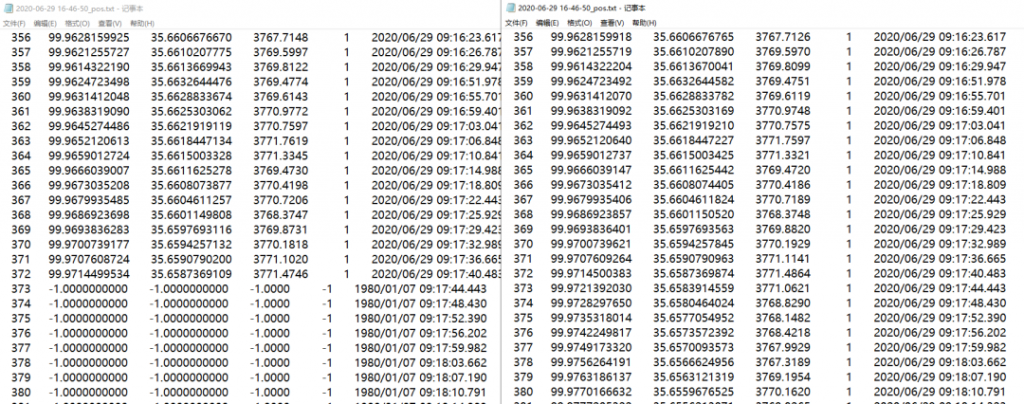
当飞行区域处于多个基站覆盖交接处,会下载到多个虚拟基站。则按照顺序分别基于虚拟基站进行差分解算。此时只能使用后差分作业,不能再进行融合差分作业。解算完成后将差分结果进行合并。每个结果取一部分,各个结果之间存在一定重叠。如图中可以第一个POS文件取到序号360POS,第二个POS文件则从序号361开始取,然后合并一起。
如操作异常,可联系飞马内业处理人员。